

Robot charging method, device and system
A charging method and robot technology, which is applied in the field of robots, can solve the problems of being unable to manage the robot and knowing the power status of the robot in time, so as to achieve the effect of improving the positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
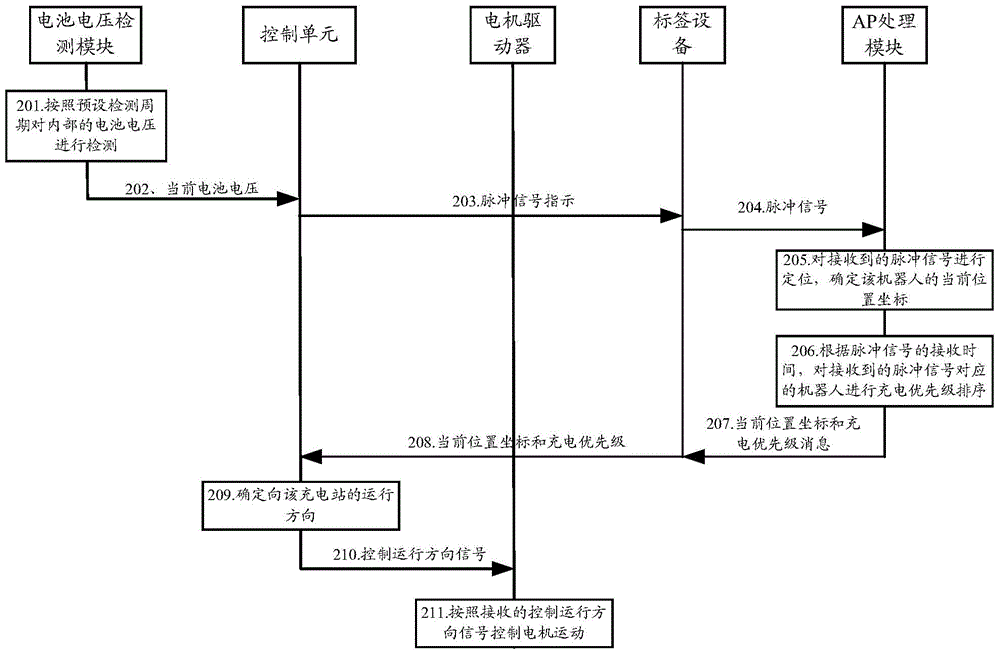
[0068] In Example 1 of the present invention, when the robot is autonomously charged, a tag device is installed on the robot (mobile body), and the tag device is used to send a pulse signal to the charging management device. The battery voltage detection module, control module, and motor driver inside the robot, And a label device, to realize the control of autonomous charging of the robot, wherein the charging management device is a wireless access point AP processing module. figure 2 It is a flow chart of a robot charging method provided in Embodiment 1 of the present invention, specifically including the following processing steps:
[0069] Step 201, the battery voltage detection module inside the robot detects the internal battery voltage according to a preset detection cycle.
[0070] Step 202, when the detected current battery voltage is lower than the threshold, the battery voltage detection module sends the current battery voltage to the control unit.
[0071] Among ...
Embodiment 2
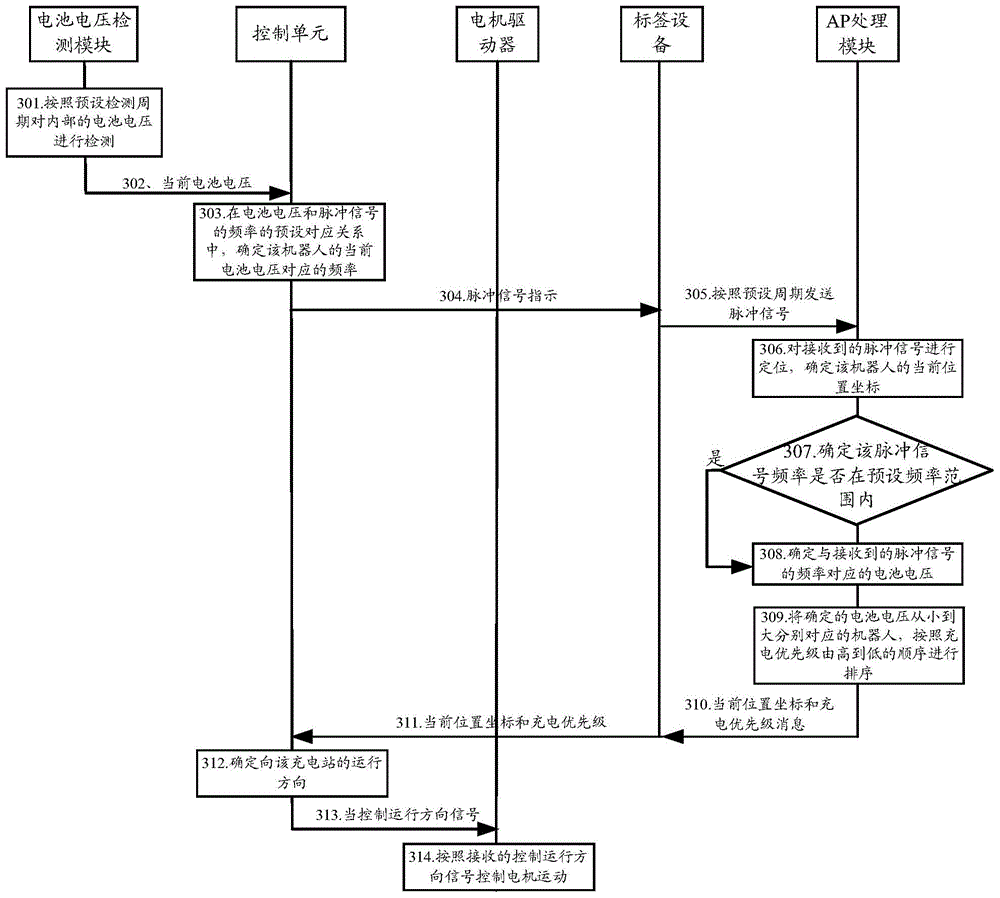
[0094] In Embodiment 2 of the present invention, when the robot is autonomously charged, a tag device is installed on the robot (mobile body), and the tag device is used to send a pulse signal to the charging management device. The battery voltage detection module, control module, and motor driver inside the robot, And a label device, to realize the control of autonomous charging of the robot, wherein the charging management device is a wireless access point AP processing module. image 3 It is a flow chart of a robot charging method provided in Embodiment 2 of the present invention, specifically including the following processing steps:
[0095] Step 301, the battery voltage detection module inside the robot detects the internal battery voltage according to a preset detection cycle.
[0096] Among them, the detected current battery voltage is the remaining power of the robot.
[0097] Step 302, the battery voltage detection module sends the detected current battery voltage t...
Embodiment 3
[0125] Based on the same inventive concept, according to the robot charging method provided by the above-mentioned embodiments of the present invention, correspondingly, Embodiment 3 of the present invention also provides a robot charging device, the structural diagram of which is as follows Figure 4 shown, including:
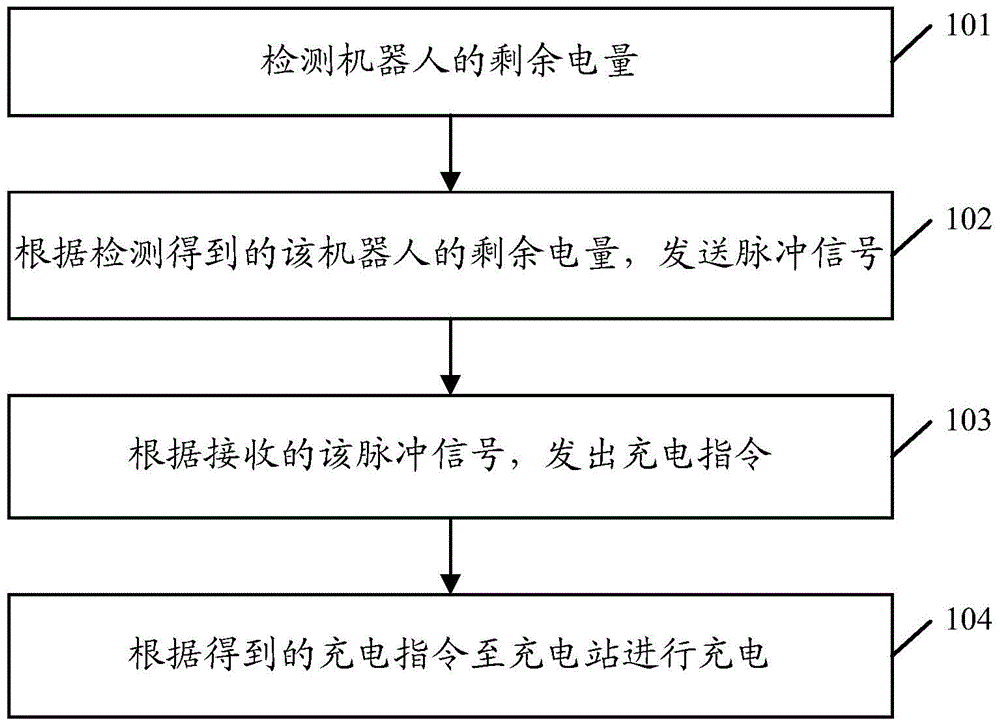
[0126] A detection unit 401, configured to detect the remaining power of the robot;
[0127] The request unit 402 is configured to send a pulse signal according to the detected remaining power of the robot;
[0128] A determining unit 403, configured to determine an operating instruction and a charging instruction according to the received pulse signal;
[0129] The charging unit 404 is configured to go to the charging station for charging according to the obtained charging instruction.
[0130] Further, the requesting unit 402 is specifically configured to send a pulse signal with a preset frequency when the remaining power of the robot is less than a thres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More