

Navigation remaining time acquiring method and navigation remaining time acquiring apparatus
A technology of remaining time and acquisition method, which is applied in the field of navigation, can solve the problem of low accuracy of remaining time and achieve the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
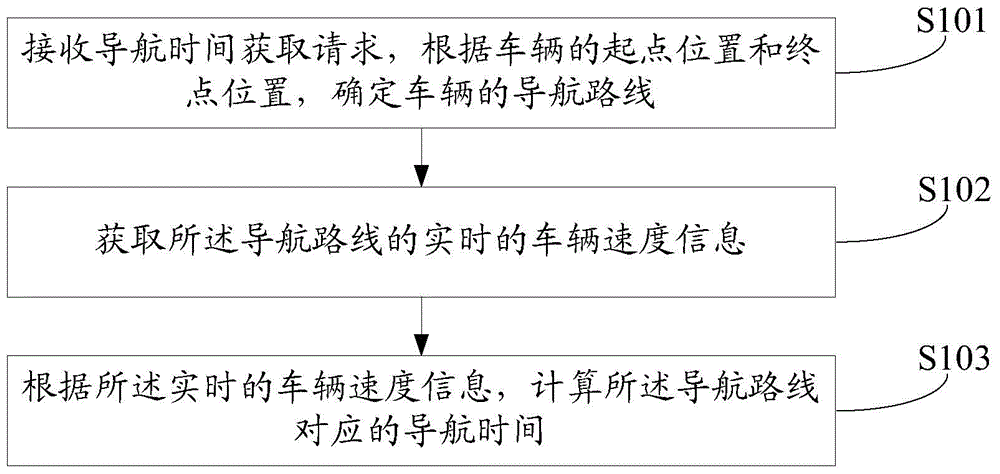
[0028] figure 1 The implementation flow of the method for obtaining the remaining navigation time provided by the first embodiment of the present invention is shown, and the details are as follows:
[0029] In step S101, a request for acquiring the remaining navigation time is received, and the remaining navigation route of the vehicle is determined according to the current location and the destination location of the vehicle.
[0030] Specifically, the request for obtaining the remaining navigation time may be sent when the vehicle starts to navigate, or periodically during the navigation process. Send a navigation remaining time acquisition request when starting navigation, for requesting to obtain the driving time required for the entire navigation remaining route; periodically send a navigation remaining time acquisition request during the navigation process, for navigating the remaining navigation time according to the sending cycle The driving time required for the rema...
Embodiment 2
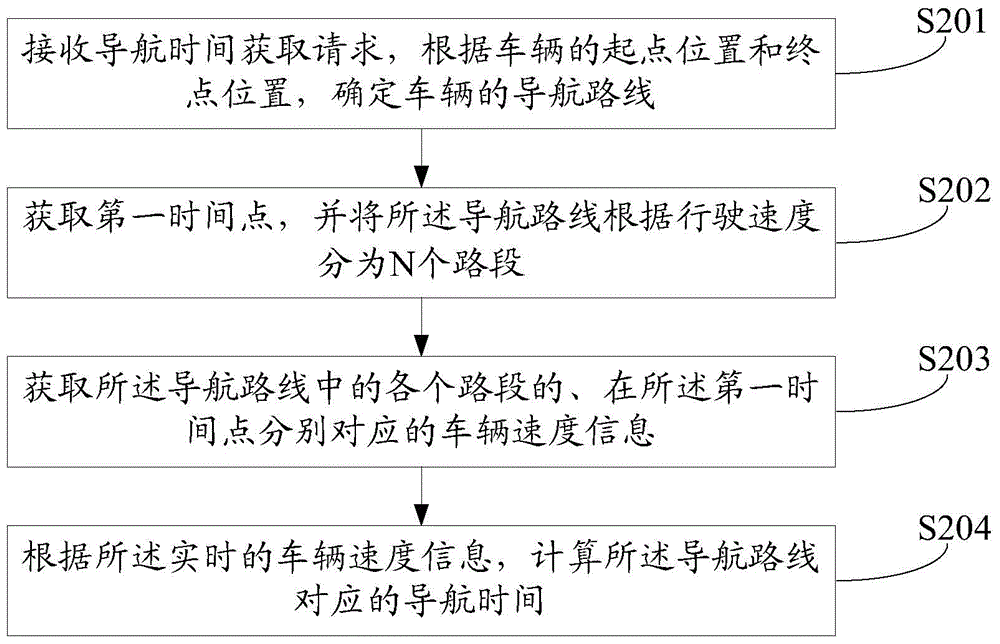
[0048] figure 2 The implementation flow of the method for obtaining the remaining navigation time provided by the second embodiment of the present invention is shown, and the details are as follows:
[0049] In step S201, a request for obtaining the remaining navigation time is received, and the remaining navigation route of the vehicle is determined according to the current location and the destination location of the vehicle.
[0050] In step S202, the first time point is obtained, the first time point is the time point when the request for obtaining the remaining navigation time is received, and the remaining navigation route is divided into N road sections according to the driving speed, and the N is a positive integer greater than 0.
[0051] Wherein, the remaining route of the navigation is divided into N road sections according to the driving speed, and the driving speed can be the driving speed of historical statistics, can be divided by different road section names,...
Embodiment 3
[0067] image 3 The implementation process provided by the third embodiment of the present invention is shown, and the details are as follows:
[0068] In step S301, a request for obtaining the remaining navigation time is received, and the remaining navigation route of the vehicle is determined according to the current location and the destination location of the vehicle.
[0069] In step S302, a first time point is obtained, the first time point corresponds to the time point when the navigation remaining time acquisition request is received, and the navigation remaining route is divided into N road sections according to the driving speed, and the N is a positive integer greater than 0.
[0070] In step S303, according to the time point when the vehicle arrives at the i-th road segment, the vehicle speed corresponding to the time point when the vehicle arrives at the i-th road segment is obtained. , the driving speed corresponding to the i-1th road section before this road ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More