

Method for tracking trajectories of tracked robots
A trajectory tracking and robot technology, applied in two-dimensional position/channel control and other directions, can solve the problems of low construction efficiency, potential safety hazards, time-consuming and labor-intensive, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is not limited by the following examples, and specific implementation methods can be determined according to the technical solutions of the present invention and actual conditions.
[0028] Below in conjunction with embodiment and accompanying drawing, the present invention will be further described:
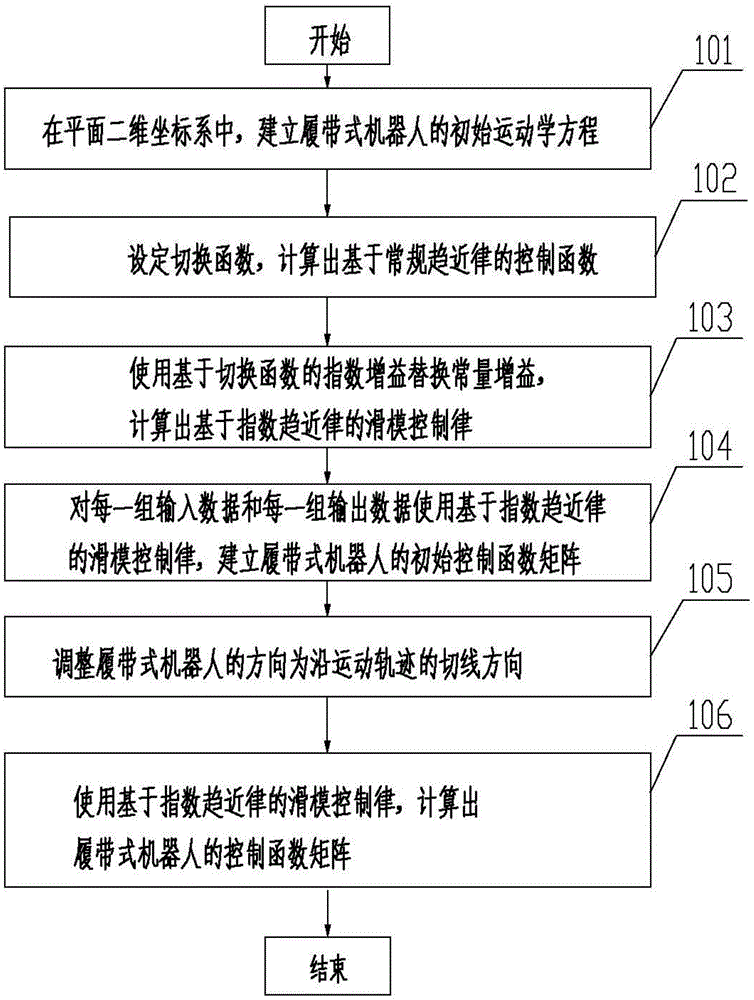
[0029] as attached figure 1 As shown, the trajectory tracking method of the crawler robot is carried out according to the following steps: Step 101, in the plane two-dimensional coordinate system, establish the initial kinematic equation of the crawler robot; Step 102, set the switching function, and calculate the The control function of the reaching law; step 103, use the exponential gain based on the switching function to replace the constant gain, calculate the sliding mode control law based on the exponential reaching law; step 104, use for each group of input data and each group of output data Based on the sliding mode control law of the expone...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More