

A bionic four-finger closed manipulator
A manipulator, form-closed technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of poor control ability of manipulators, and achieve the effect of long service life and easy realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the purpose, technical solution and advantages of the present invention clearer, further description will be given below in conjunction with the accompanying drawings and implementation examples.
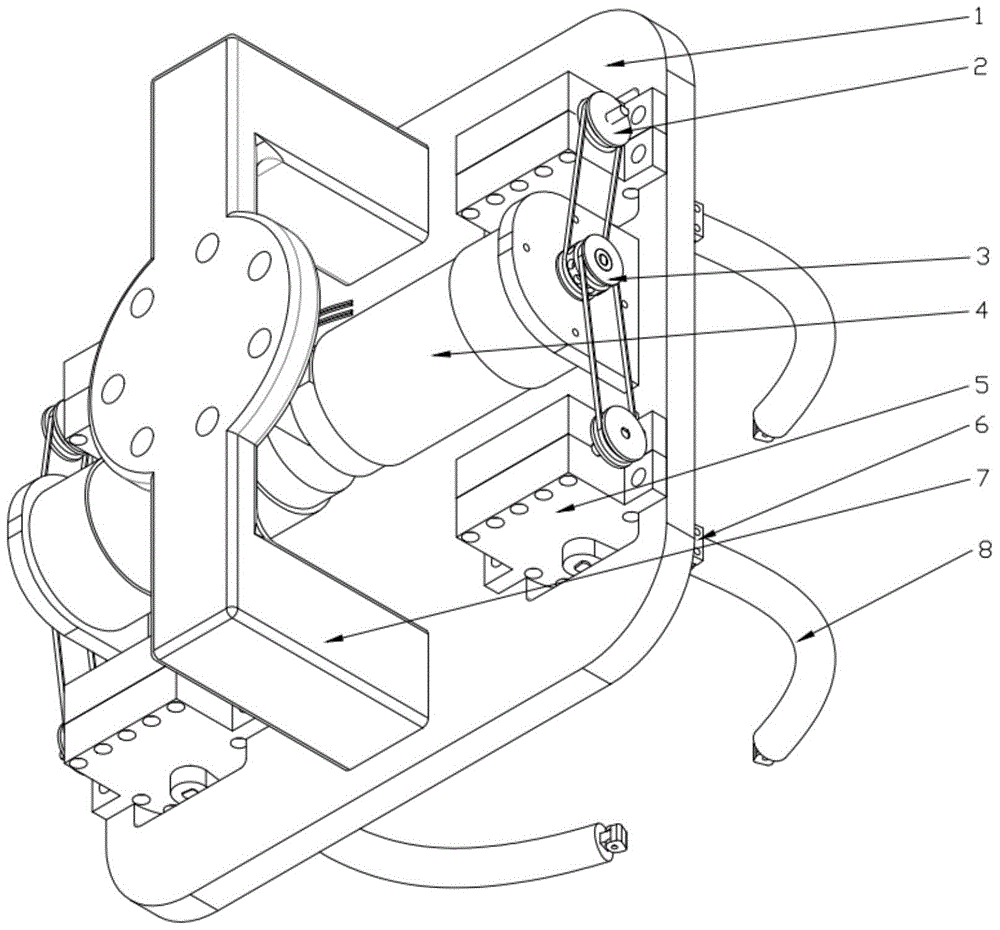
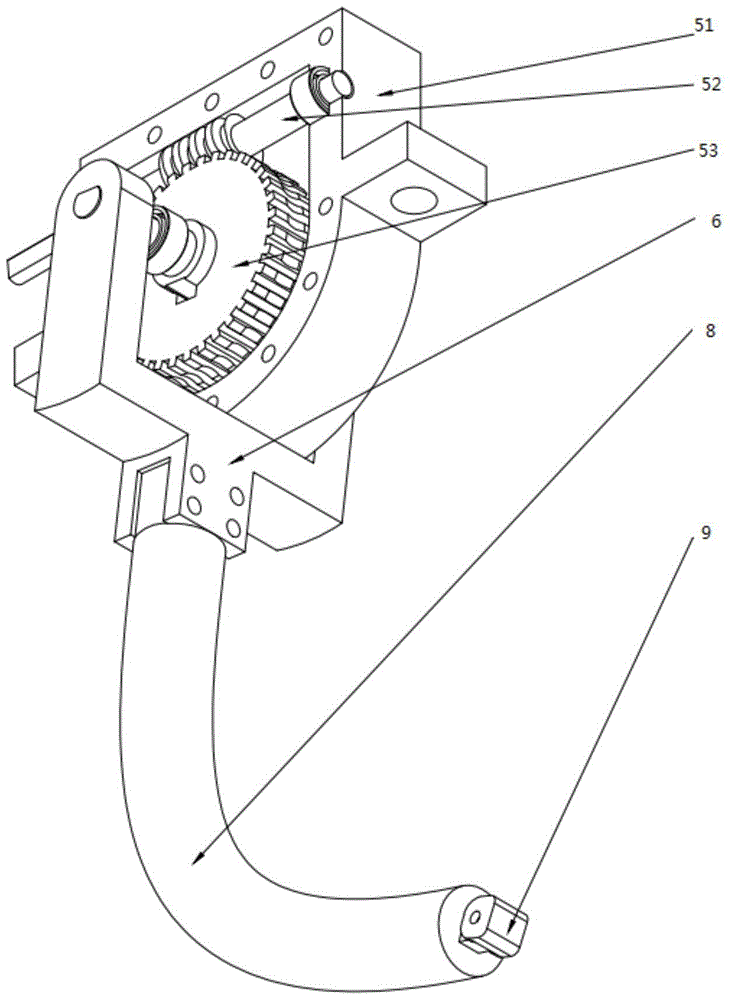
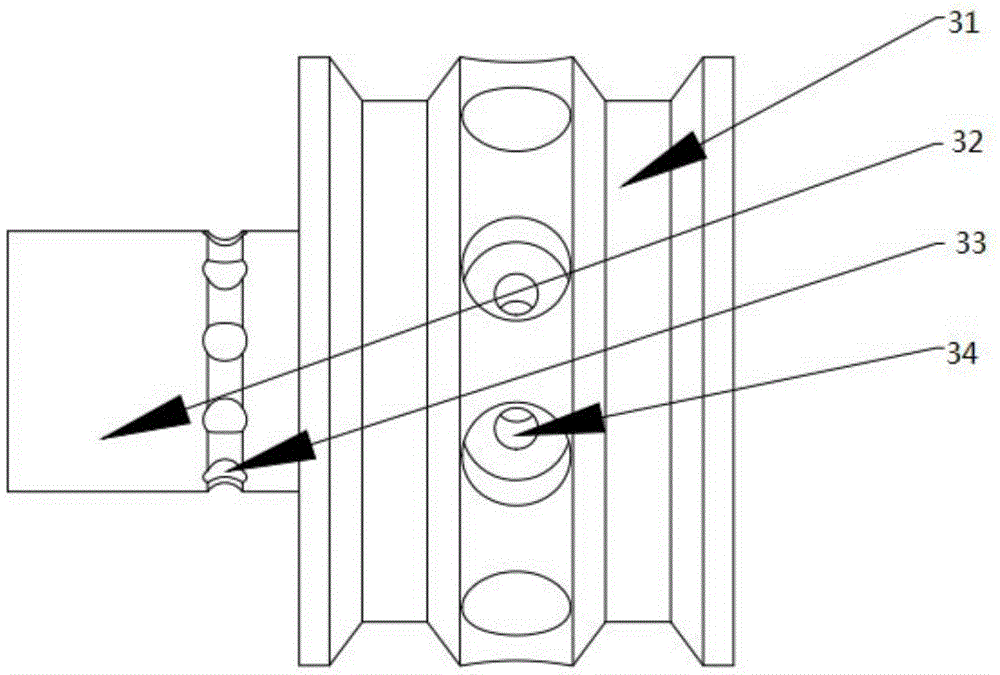
[0022] Such as figure 1 , figure 2 , image 3 As shown, a bionic four-finger-shaped closed manipulator in this embodiment includes a fixed frame, a DC motor, a mechanical finger, and a transmission system for the DC motor to drive the mechanical finger, specifically a rectangular skeleton 1, a worm gear pulley 2, a torque Protection device 3, DC motor 4, worm gear mechanism 5, finger fixing part 6, rectangular skeleton fixing part 7, arc mechanical finger 8, fingertip 9; worm gear reducer 5 includes worm gear frame 51, worm 52, worm gear 53 ; The torque protection device 3 includes an outer ring structure 31, an inner shaft structure 32, an annular rolling groove, a ball groove 33, and a mounting hole 34 for balls and springs.
[0023] The fixing frame of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More