

A Force and Angle Controllable Gripper Based on Pneumatic Artificial Muscle
A technology of pneumatic artificial muscles and claws, applied in the field of intelligent bionic robots, can solve the problems of difficult manufacturing and assembly, small grasping force, and complex structure, and achieve low difficulty in assembly and manufacturing, stable grasping performance, and large grasping force Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with accompanying drawing, the present invention is described in further detail:
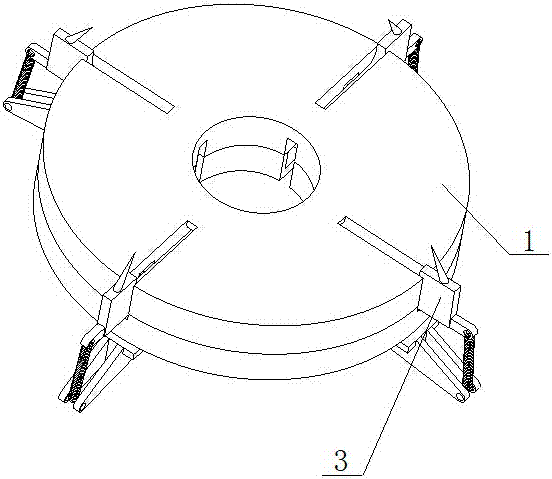
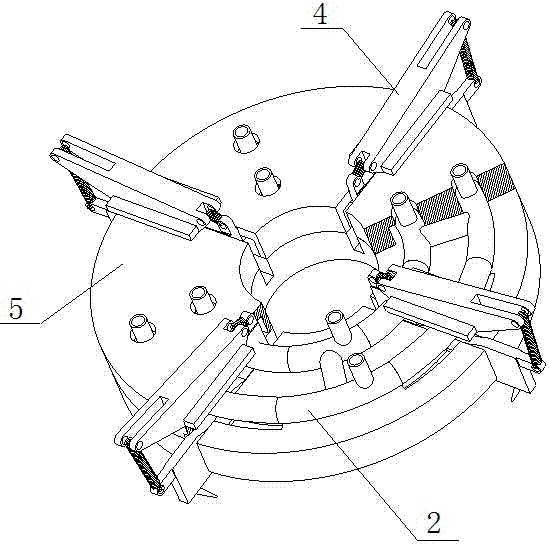
[0038] As shown in the figure: a force and angle controllable hook based on pneumatic artificial muscles, including a guide plate 1, a pneumatic spring assembly 2, a hook 3, a suspension 4, and a coupling plate 5; the coupling plate 5 and the guide The discs 1 are aligned and covered with each other, and the guide disc 1 and the coupling disc 5 are provided with a pneumatic spring assembly 2; the upper part of the hook 3 is installed with a suspension 4; the hook 3 and the suspension 4 are embedded in the aligned coupling disc 5 and guide disc. 1; the pneumatic spring assembly 2 interspersed between the claw 3 and the suspension 4; the movement of the claw 3 and the suspension 4 is controlled by the expansion and contraction of the pneumatic spring assembly 2.
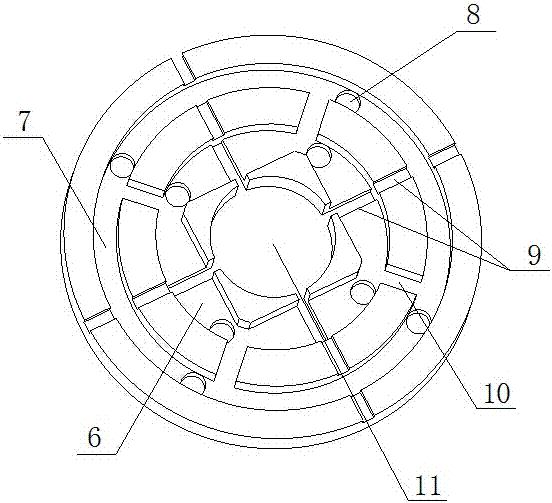
[0039] The end face of the coupling disc 5 facing the guide disc 1 is provided with an inner card groove 6,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More