

Four-degree-of freedom electrically driven multi-joint industrial manipulator of closed-chain structure
An industrial manipulator and degree of freedom technology, applied in the field of manipulators, can solve problems such as low modularization, high cost, and complex structure, and achieve the effects of high modularization, low cost, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The technical solution of the present invention will be further described below with reference to the accompanying drawings.
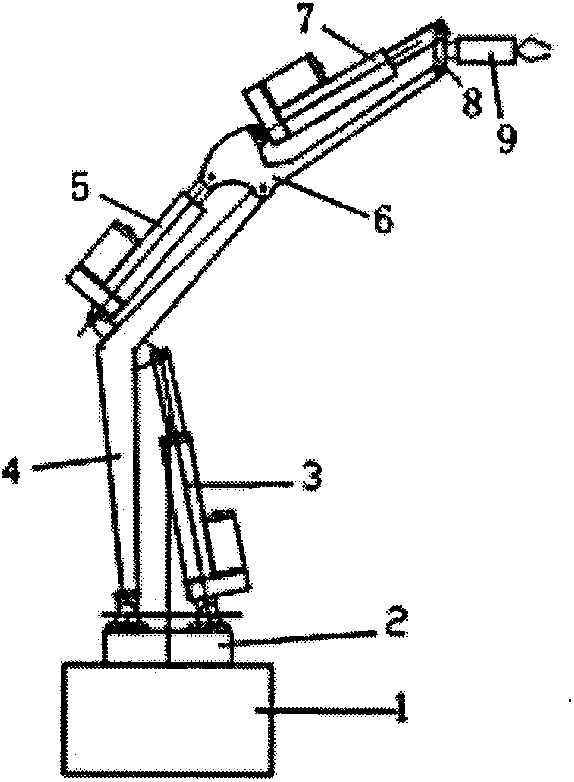
[0010] A four-degree-of-freedom electric-driven multi-joint industrial manipulator with closed-chain structure, consisting of 1 base, 2 turntables, 3 large arms, 4 large-arm electric push rods, 5 small arms, 6 small-arm electric push rods, and 7 wrist swings rod, 8 wrist electric push rods, and 9 claws. The big arm is installed on the turntable. The big arm electric push rod is connected with the big arm and the turntable through the hinge. The arms are connected, the wrist electric push rod is connected with the wrist swing rod and the forearm through a hinge, and the claw is installed on the wrist swing rod.
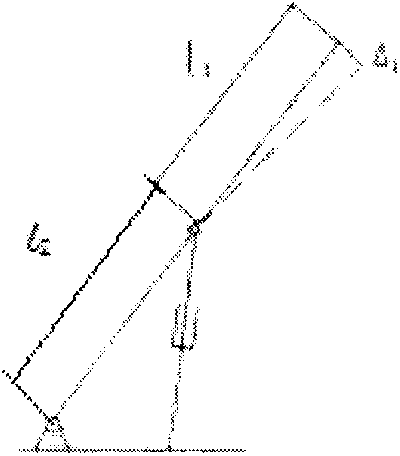
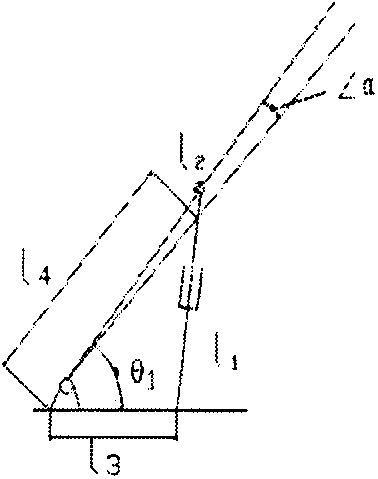
[0011] During work, due to the mass of the arm, the motor and the clamped heavy object, the manipulator will generate static and dynamic loads on the arm, and the arm will be deformed, such as figure 2 As shown, it is obvious that the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More