

Position and posture adjusting passive manipulator for digestive endoscopy conveying robot
An endoscope and robot technology, which is applied in gastroscope, esophagoscope, medical science and other directions, can solve the problems of different initial postures and has not been carried out, and achieve the effect of realizing gravity balance, meeting the needs of posture adjustment and ensuring safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings.
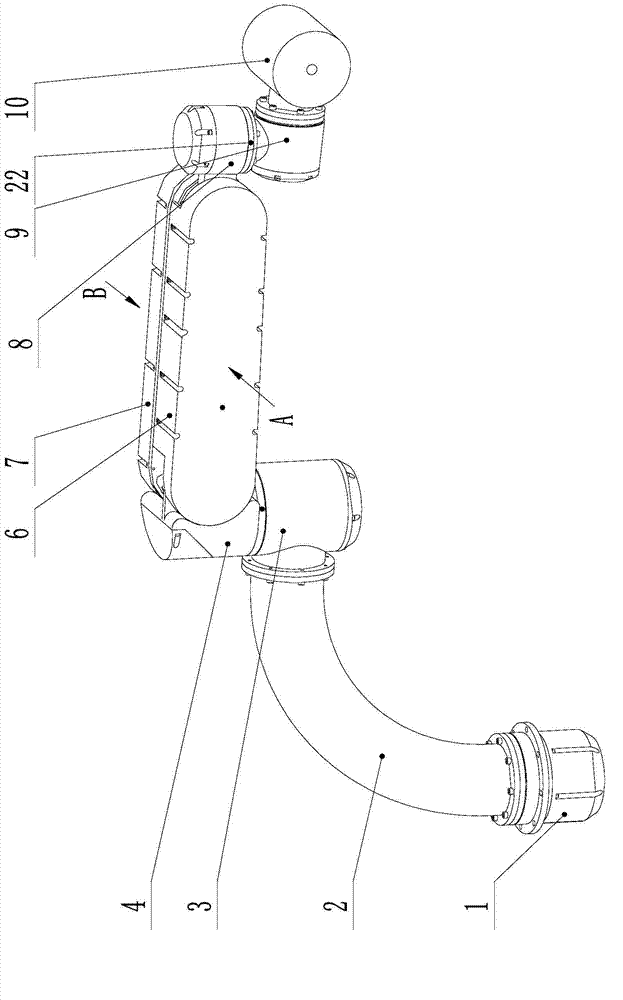
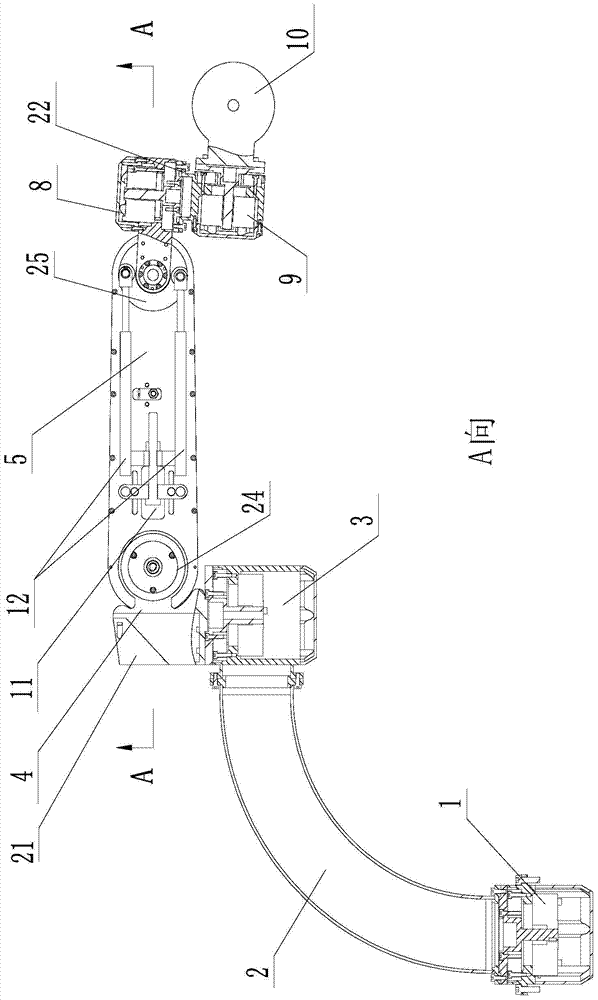
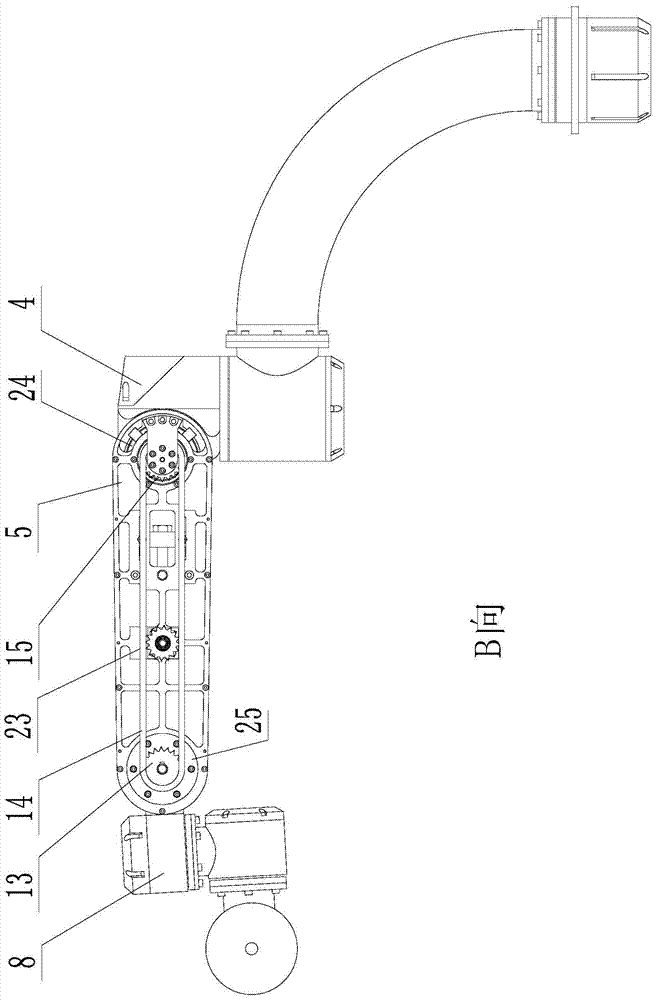
[0025] Such as Figure 1~2 As shown, the present invention includes a first joint 1, a first arm 2, a second joint 3, a third joint 4, a second arm 5, a fourth joint 8, a connector 22, a fifth joint 9 and a digestive endoscope The endoscope delivery end 10 , wherein the third joint 4 includes a connecting seat 21 and a rotating joint 24 , and the fourth joint 8 includes a connecting wheel 25 . The first joint 1 and the second joint 3 are respectively connected to both ends of the curved first arm 2, and the first joint 1 is rotationally connected to the first arm 2, and the second joint 3 is connected to the first arm The rod 2 is fixedly connected, the second joint 3 is rotationally connected with the third joint 4 through the connecting seat 21, the third joint 4 is rotationally connected with one end of the second arm 5 through the rotary joint 24, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More