

a differential joint
A joint and differential speed technology, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of large volume, low load capacity, and poor stability, and achieve the effect of improving control accuracy, high load capacity, and reducing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
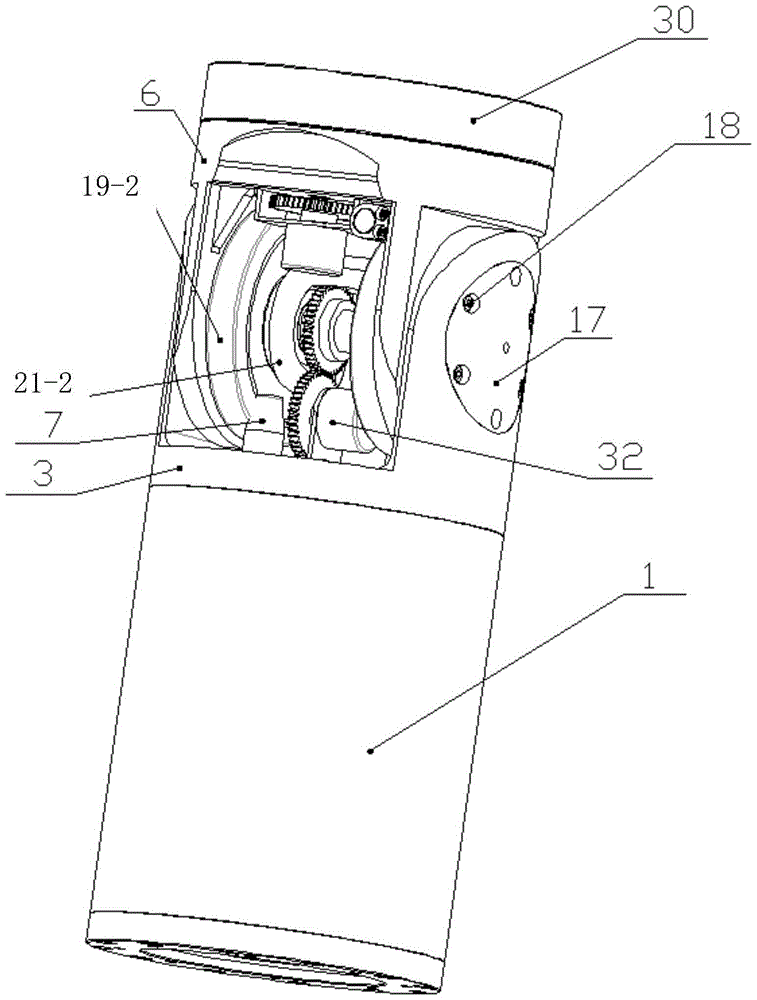
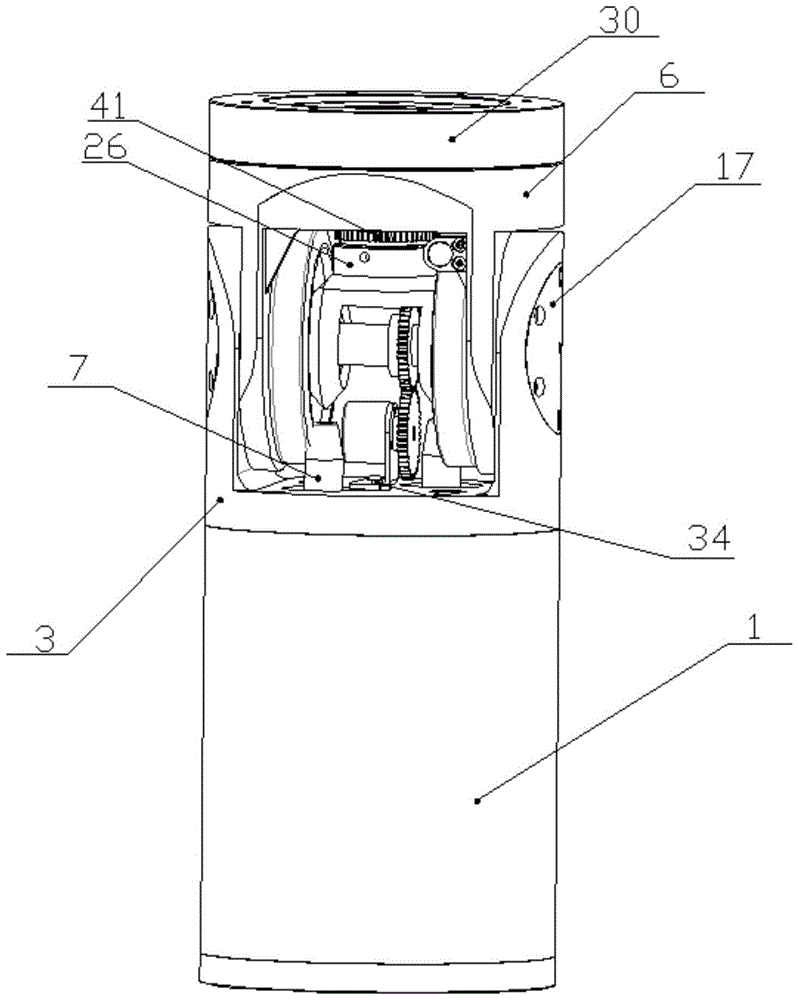
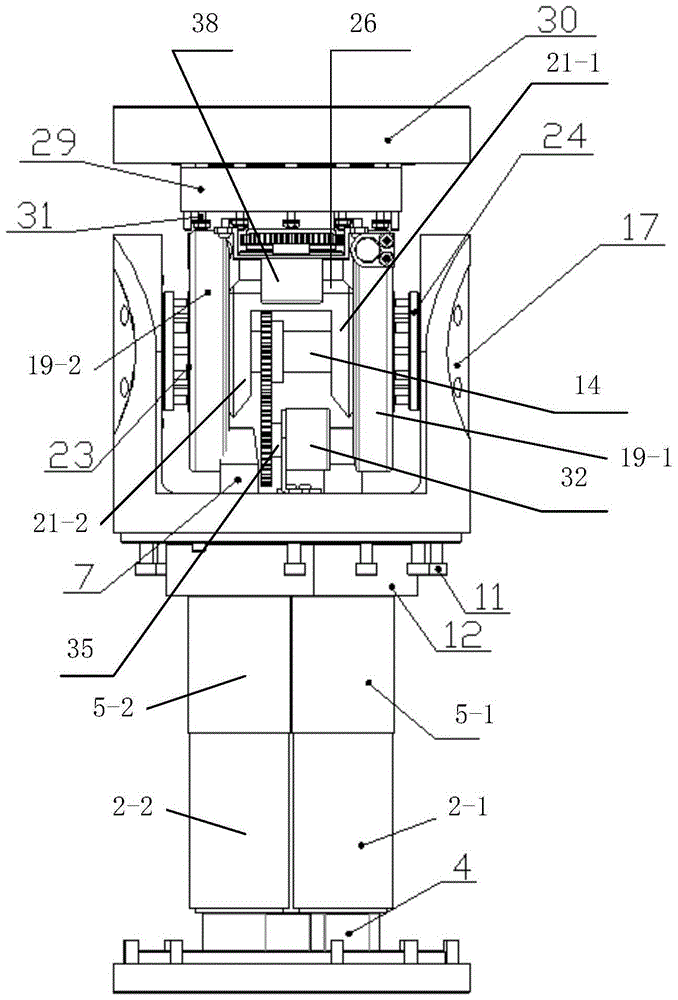
[0018] combine Figure 1 to Figure 7 , the present invention includes a transition connection cylinder 1, a joint support frame 3 installed on the upper end of the transition connection cylinder 1, a main shaft 14 installed in the middle of the joint support frame 3 through two bearing seats 17, and a joint structure frame 6 sleeved on the main shaft 14 And the joint end face flange 30 that is arranged on the joint structure frame 6 upper ends, two motors 2-1 and 2-2 are installed in the transition connecting cylinder 1, the lower end of each motor is connected with the photoelectric encoder 4, each motor The output ends of 2-1 and 2-2 are connected with planetary reducers 5-1 and 5-2, and the output ends of each planetary reducer 5-1 and 5-2 are connected with a gear shaft 7, and the gear shaft 7 The toothed end extends into the joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More