

Optimal trajectory tracking method of full-degree-of-freedom control force for rehabilitation walking training robot
A walking training and trajectory tracking technology, applied in two-dimensional position/channel control and other directions to achieve the optimal effect of full-degree-of-freedom control force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited by the embodiments.
[0046] The present invention is a full-degree-of-freedom control force optimal trajectory tracking method for a rehabilitation walking training robot, and the specific steps are as follows:
[0047] 1) Based on the characteristics of the redundant rehabilitation walking training robot, combined with the precise feedback linearization theory, the linearization model of the system is established;
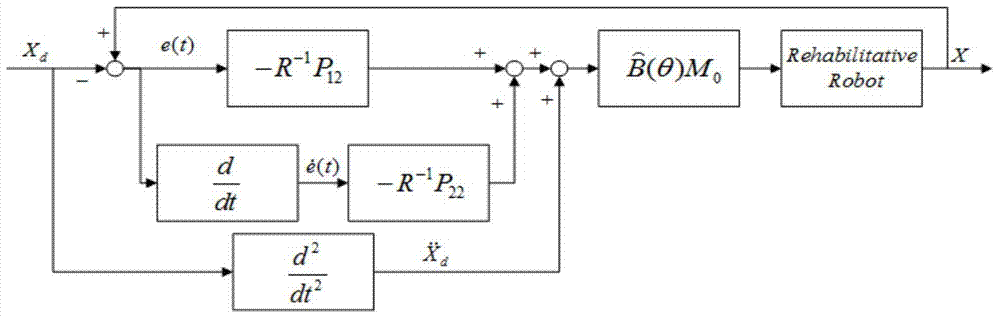
[0048] 2) Based on the system control energy, design the quadratic performance index of the redundant rehabilitation walking training robot, and adopt the optimal control method to make the system achieve the minimum energy consumption and complete the optimal control of trajectory tracking;
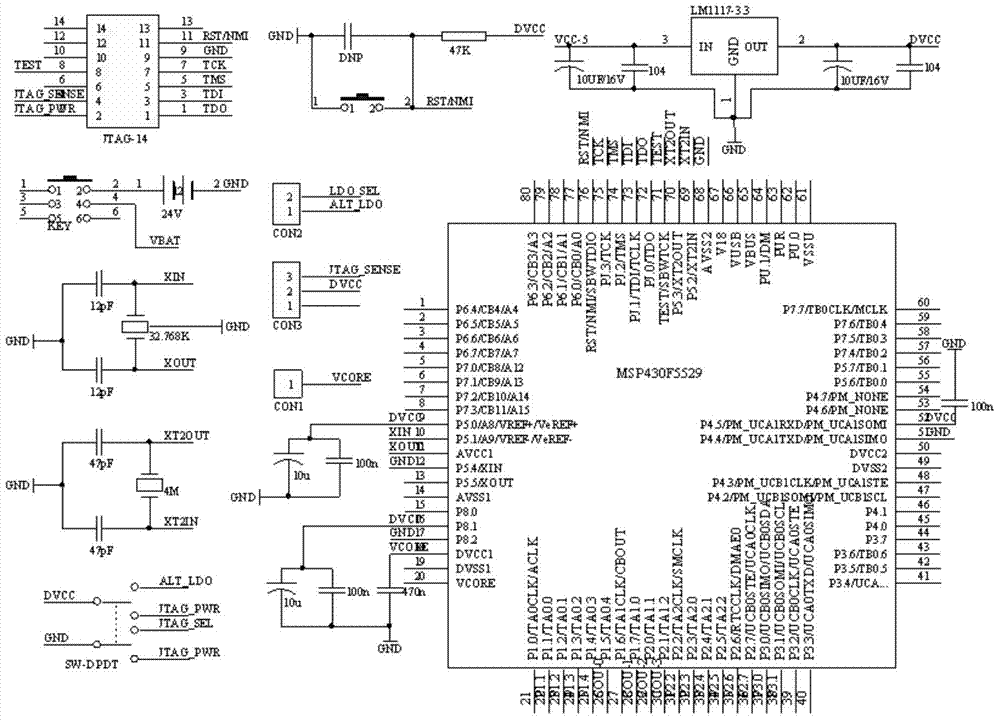
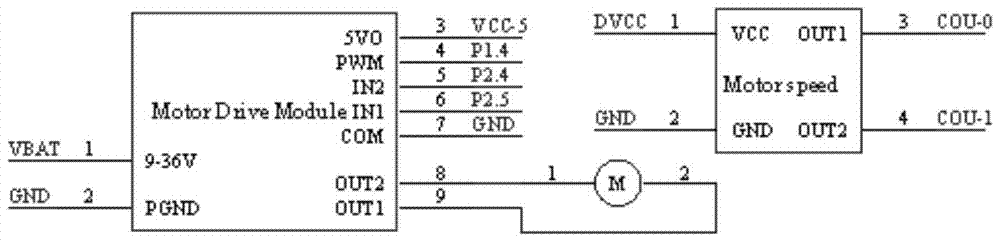
[0049] 3) Based on the MSP430 series single-chip microcomputer, the output PWM signal is provided to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More