

Desktop type cartesian coordinate robot assembled with 3-degree-of-freedom (DOF) wrist device
A Cartesian coordinate, desktop-style technology, applied in feeding devices, manipulators, program-controlled manipulators, etc., can solve problems such as application limitations, and achieve the effects of light weight, small size, and a wide range of operating fields
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The structure and function effects of the desktop Cartesian robot equipped with a 3-DOF wrist device of the present invention will be described in detail below in conjunction with the accompanying drawings.
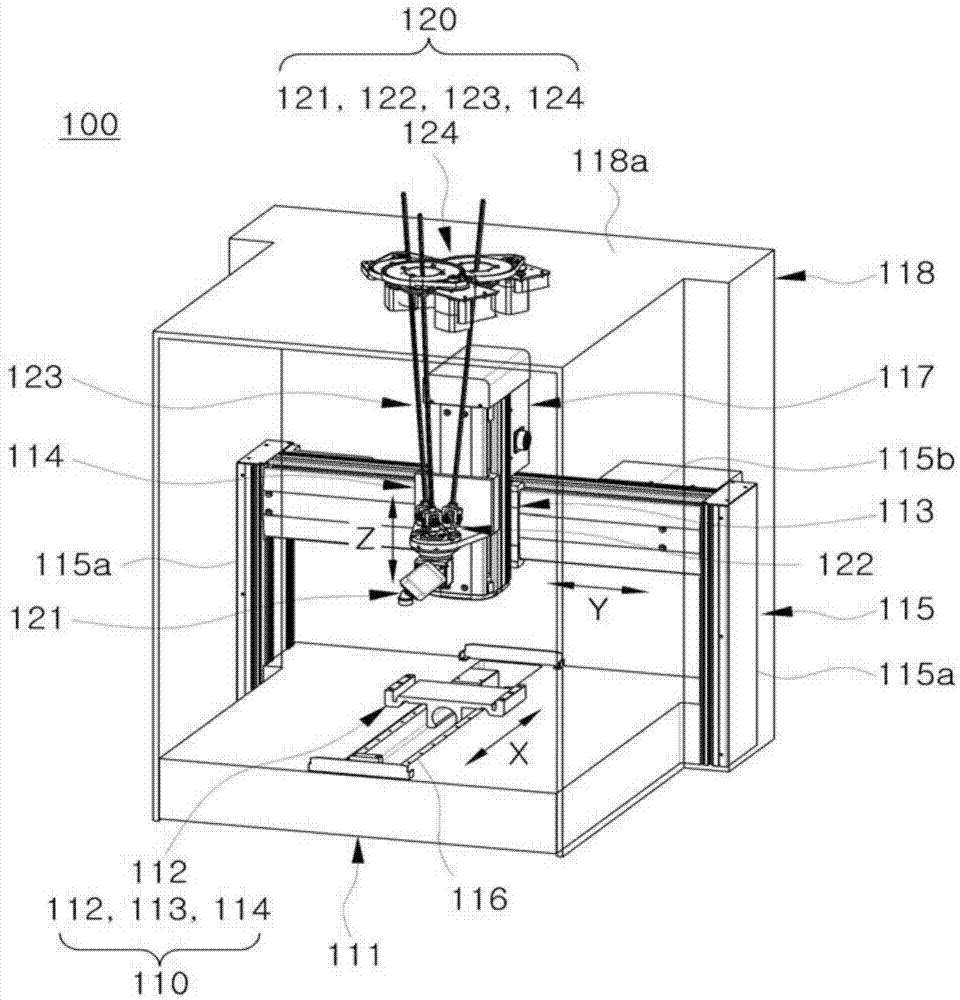
[0044] figure 1 It is a perspective view of a desktop Cartesian robot equipped with a 3-DOF wrist device according to an embodiment of the present invention
[0045] Such as figure 1 As shown, the composition of the desktop Cartesian robot (100) equipped with a 3-DOF wrist device of the present invention generally includes a desktop Cartesian robot (110) and a 3-DOF wrist device (120).
[0046] The desktop Cartesian robot (110) is based on the base (111) and has two shafts respectively assembled on the base (111), and the remaining one shaft is assembled on one of the above-mentioned two shafts.
[0047] The base has an X-axis driving part (112) assembled on the base (111) to drive in the direction of the X-axis, and the hanger type support shaft (115) is assem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More