

Manual alphabet identification method based on Leap Motion
A recognition method and letter technology, applied in the field of human-computer intelligent interaction, can solve the problems of inability to meet the naturalness of interaction, high computational cost, inconvenient portability, etc., so as to improve the effect of sign language recognition and human-computer interaction, improve naturalness, and improve The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The specific implementation of the present invention will be further explained in detail below in conjunction with the accompanying drawings, but the implementation and protection of the present invention are not limited thereto. Realized with reference to prior art.
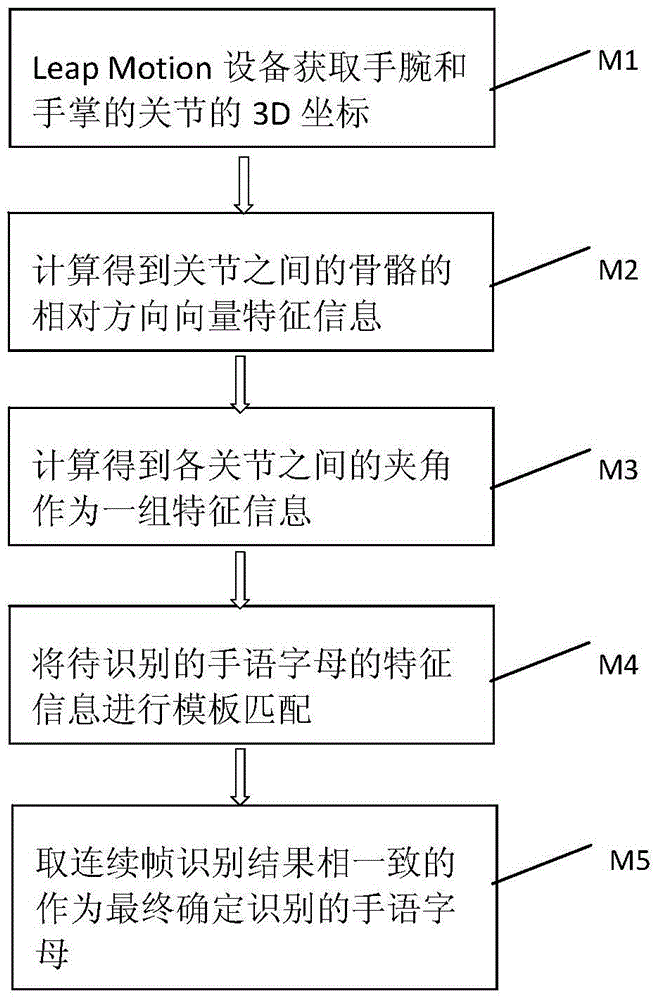
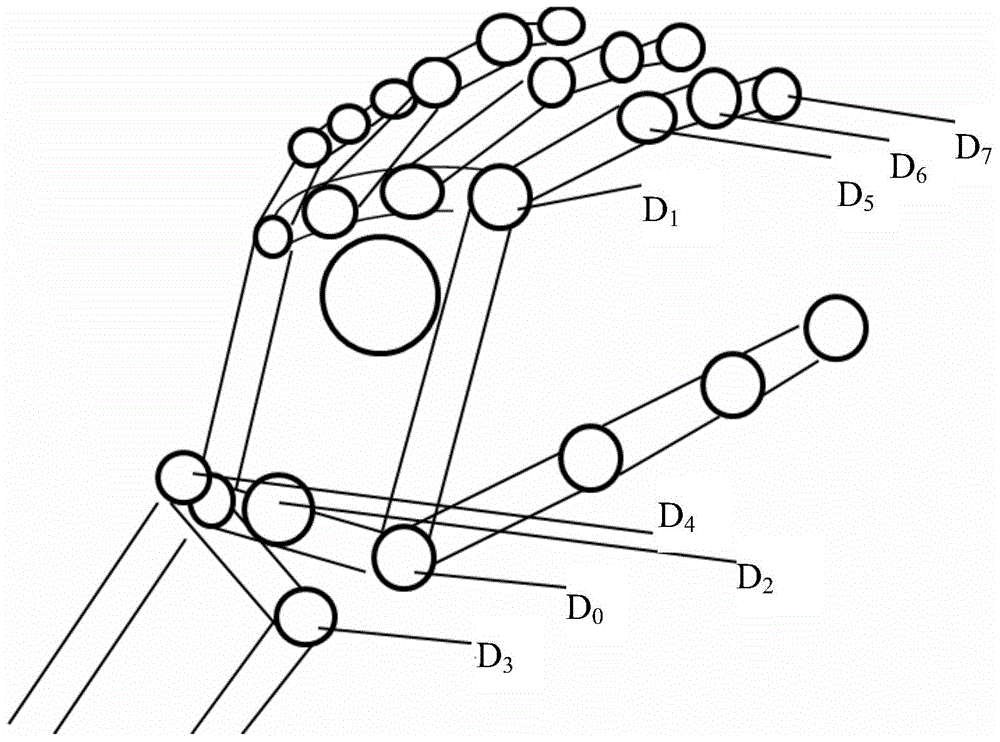
[0022] refer to figure 1 , the Leap Motion device calls the function hand.isLeft() to determine the type of the acquired hand, and calls the function arm.wristPosition() to obtain the joint point D 2 call the function arm.direction() to obtain the 3D direction vector of the arm, call the functions bone.prevJoint(), bone.nextJoint() and bone.direction() respectively to obtain the 3D coordinates and relative direction vector of the finger phalanx, call The function direction.pitch() obtains the pitch angle of the palm relative to the arm;
[0023] The coordinates returned by the Leap Motion device are based on the central viewing angle of the device as the origin of the coordinates, so the absolute coordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More