

Three degree-of-freedom self-stabilizing box body grab bucket based on parallel mechanism
A degree of freedom and parallel connection technology, applied in the direction of load hanging components, transportation and packaging, etc., can solve the problems of easy jitter and bumps, great damage to the outside of the box, and damage to the items in the box, to achieve superior motion characteristics and structure Compact and easy to operate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
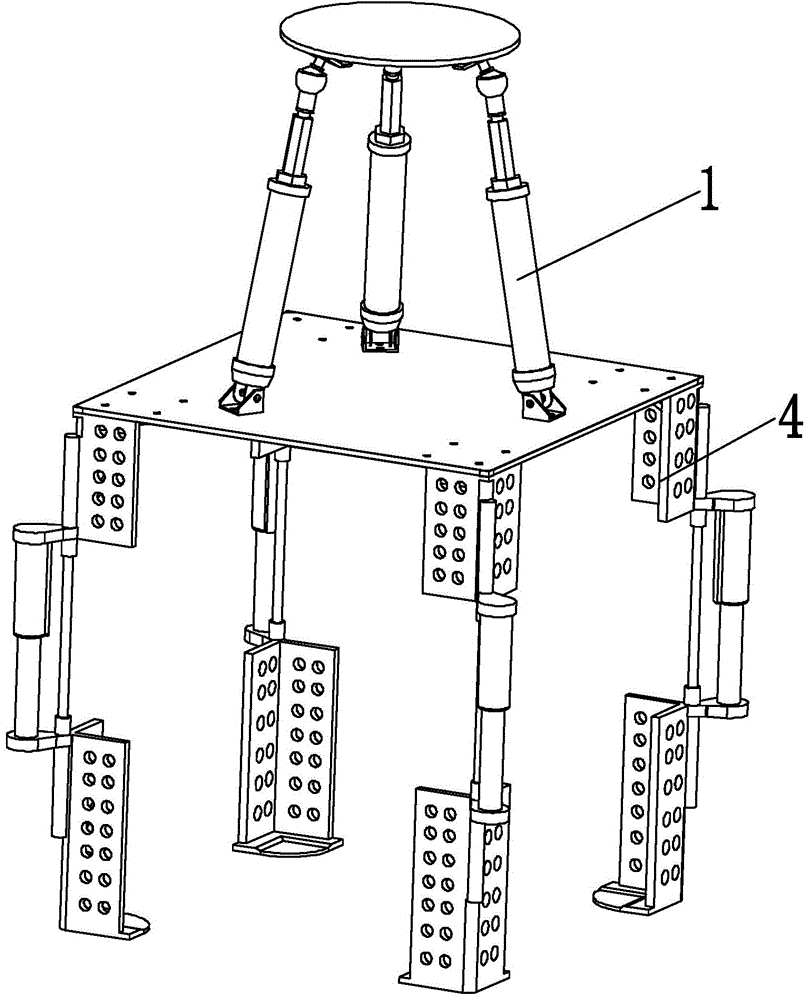
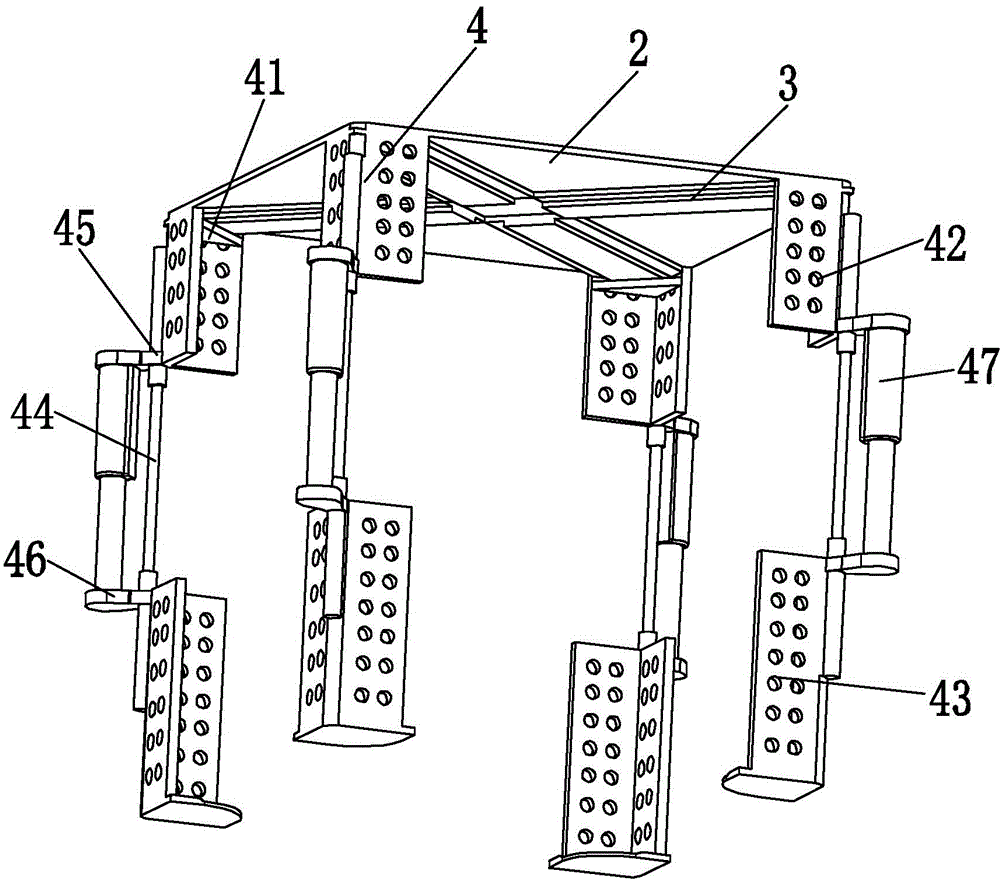
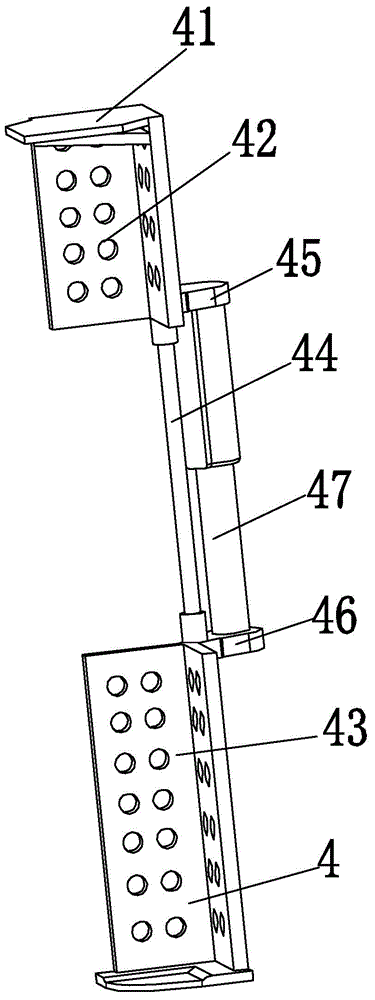
[0017] Such as figure 1 , figure 2 , image 3 with Figure 4 As shown, a three-degree-of-freedom self-stabilizing box grab based on a parallel mechanism includes a three-degree-of-freedom parallel mechanism 1, a fixed plate 2, four electric slide rails 3 and four mechanical claws 4, and the three-degree-of-freedom The parallel mechanism 1 is located directly above the fixed plate 2, and the three-degree-of-freedom parallel mechanism 1 and the fixed plate 2 are connected by bolts; the fixed plate 2 has a square structure, and the four electric slide rails 3 are respectively locate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More