

Ball playing robot
A technology of a robot, a robot arm, used in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The following will clearly and completely describe the technical solutions in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
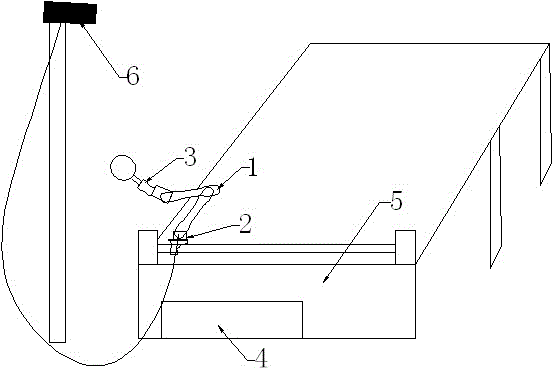
[0014] see figure 1 , the embodiment of the present invention includes:
[0015] A kind of playing robot, comprises: microcomputer 4, electric console 5, robot arm, self-sensing system 2 and end effector 3, described robot arm is imitation arm multi-joint structure, and described multi-joint structure comprises a longitudinal joint and at least The two-pole transverse joint, the bottom of the longitudinal joint is connected to the mover of the linear motor, and the linear motor is fixed above the electric console 5,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More