

Control method and control device for controlling coordinated flight of multiple pieces of flight equipment
A technology of flight equipment and control method, which is applied in the direction of three-dimensional position/course control, etc., can solve the problem that multiple flight equipment cannot achieve the ideal flight effect, and achieve the effect of avoiding uncertainty and incoordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
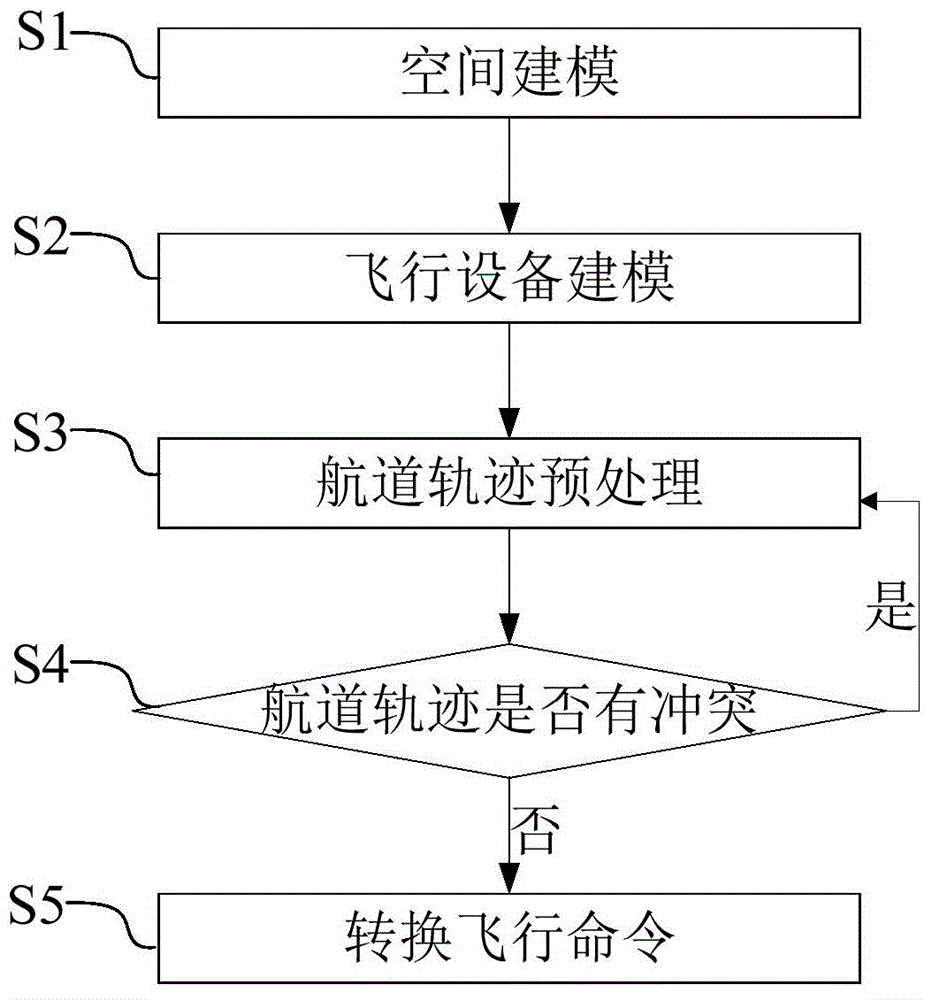
[0042] Such as figure 1 As shown, this embodiment provides a control method for coordinated flight of multiple flight devices, including:
[0043] S1. Space modeling
[0044] Select a spatial coordinate system to model the airspace where the flight equipment is located; among them, the choice of the spatial coordinate system can be selected but not limited to the GPS coordinate system or the relative coordinate system, but no matter which specific coordinate system is used, it is necessary to Obstacles in the airspace that affect flight are modeled, such as buildings in the airspace, indoor lights, furniture, etc.
[0045] S2. Flight equipment modeling
[0046] Model the size and flight parameters of the flight equipment, including but not limited to the following: 1. The physical three-dimensional size of the flight equipment, 2. The maximum linear velocity, maximum acceleration, maximum angular velocity, and maximum angular acceleration of the flight equipment, 3. Flight Th...
Embodiment 2
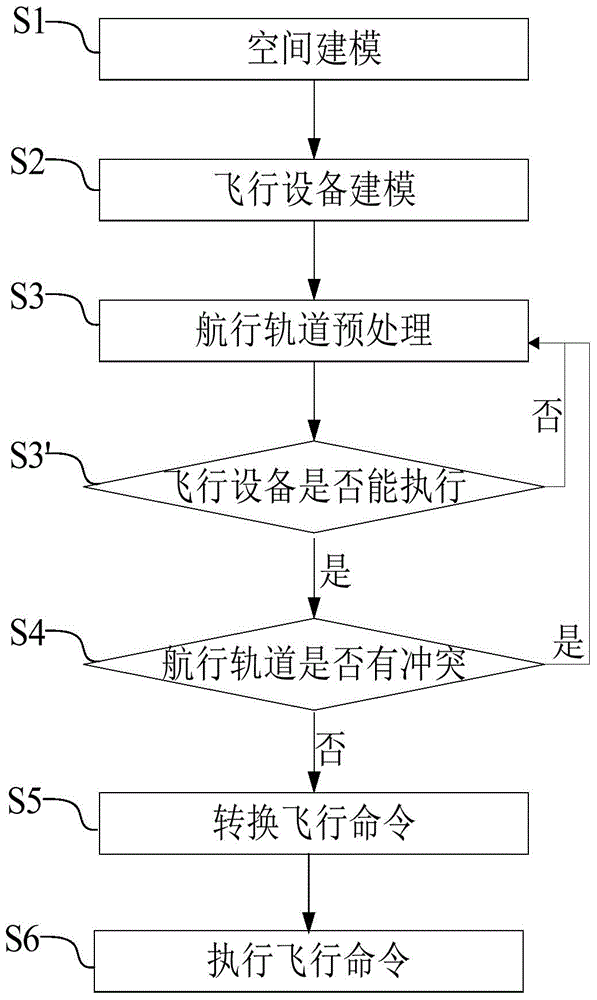
[0075] Such as image 3 As shown, embodiment two has made the following improvements on the basis of embodiment one:
[0076] 1. On the basis of carrying out the planning of flight equipment navigation trajectory through steps S1-S5 in Embodiment 1, step S3' is further added:
[0077] It is judged whether the flight equipment can execute the flight order, if yes, it will enter step S4, if not, it will return to step S3 to preprocess the track track again.
[0078] Added S6 to let flight equipment execute predefined flight commands:
[0079] Inject the flight command into the flight device controller, and control the flight device to execute the flight command. In this way, the flight device can automatically execute the flight command, and the flight speed and the flight acceleration in the flight command are both vector parameters; thus, the complex and coordinated flight effect of multiple flight devices can be better realized. Specifically: each flight device has a stora...
Embodiment 3
[0087] Such as Figure 4 As shown, a control method for multi-flying equipment cooperative flight provided by Embodiment 3 includes:
[0088] S10, start;
[0089] S11, space modeling;
[0090] S12, flight equipment modeling;
[0091] S13, flight equipment preprocessing;
[0092] S14, judging whether the flight equipment can execute the corresponding flight conditions in the preprocessing step S13;
[0093] S15, judging whether there is a conflict in the channel trajectory;
[0094] S16, waterway trajectory simulation;
[0095] S17, judging whether the channel trajectory has achieved the expected effect;
[0096] S18, switching flight orders;
[0097] S19, executing a flight order.
[0098] Among them, the space modeling in S11, the modeling of flight equipment in S12, the preprocessing of flight equipment in S13, the judging whether there is a conflict in the track trajectory in S15, the conversion command in S18, and the first or second embodiment The corresponding ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More