

Driving structure used for accurately controlling wall-climbing robot
A technology of a wall-climbing robot and a driving structure, which is applied in the field of wall-climbing robots, can solve the problems of the influence of the overall wall-climbing robot operation accuracy, the inability to feedback running information in real time, the large size of the motor, etc., and achieves easy commutation, simple structure and control. Precise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
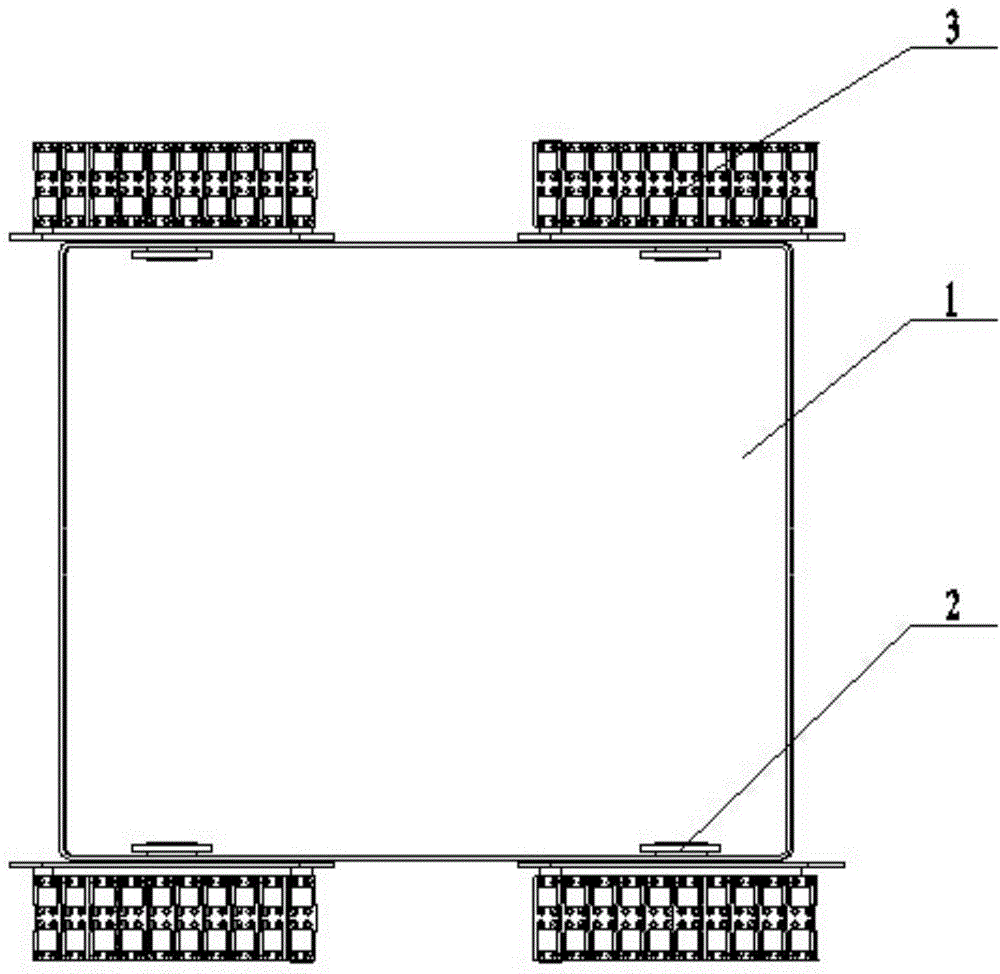
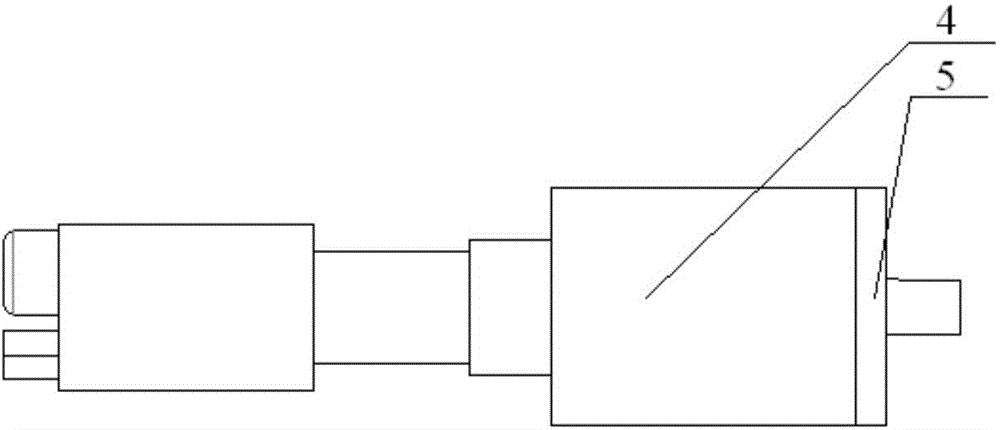
[0013] Such as figure 1 with figure 2 As shown, a driving structure for accurately controlling a wall-climbing robot of the present invention includes a car body 1, four drive units 2 and four crawler belts 3, and two drive units 2 are respectively installed on the left and right sides of the car body 1, The four drive units 2 are respectively connected to the four crawler belts 3 ; an air motor 4 is arranged inside the car body 1 , and the air motor 4 is connected to the drive unit 2 , and an encoder 5 is arranged on the air motor 4 .
[0014] The working process of this example: the crawler-type traveling mechanism is driven by the air motor 4 to realize forward, backward and turning. The air motor 4 installed in the car body 1 can produce high power with a small volume; it has high adaptability, and the speed can be changed with the load. It is especially suitable for occasions with frequent starts, and the reversing is very easy; simple stepless speed regulation, from ze...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More