

Method for distributing targets cooperatively attacked by unmanned aerial vehicle group
A technology of target allocation and cluster, applied in the directions of instruments, adaptive control, control/regulation systems, etc., can solve problems such as increasing algorithm time consumption, timely response to unfavorable real-time tasks, and inability to achieve single-machine multi-objective solution, and achieve simple implementation. convenient effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
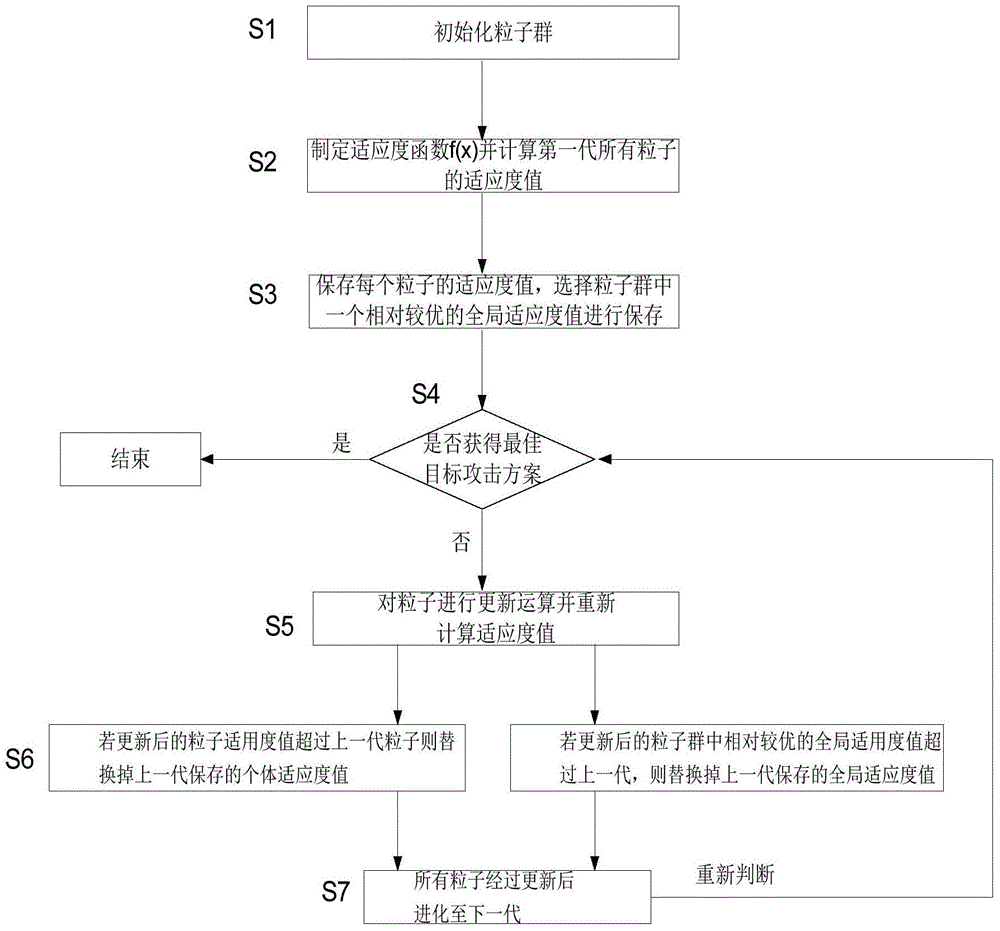
[0020] Embodiment 1: as figure 1 Shown, a kind of unmanned aerial vehicle swarm cooperative strike target allocation method, the concrete steps of described method are as follows:
[0021] Step1. Initialize the particle swarm, convert the relationship between the UAV swarm and the target into a particle matrix form as a particle, and perform random initialization according to the constraints;
[0022] Step2. Formulate the fitness function f(x) according to the evaluation criteria, and calculate the fitness value of each particle;
[0023] Step3. Save the fitness value of each particle, and select the initial individual best fitness value and the global best fitness value from all particle fitness values to save;
[0024] Step4. Judging whether the optimal target allocation scheme is reached, namely MAXf(x), MAXf(x) is the maximum value of the difference between the attack income and the battle damage. If the maximum value of the fitness function f(x) is not calculated, MAXf...
Embodiment 2
[0030] Embodiment 2: as figure 1 Shown, a kind of unmanned aerial vehicle swarm cooperative strike target allocation method, the concrete steps of described method are as follows:
[0031] Step1. Initialize the particle swarm, convert the relationship between the UAV swarm and the target into a particle matrix form as a particle, and perform random initialization according to the constraints;
[0032] Step2. Formulate the fitness function f(x) according to the evaluation criteria, and calculate the fitness value of each particle;
[0033] Step3. Save the fitness value of each particle, and select the initial individual best fitness value and the global best fitness value from all particle fitness values to save;
[0034] Step4. Judging whether the optimal target allocation scheme is reached, namely MAXf(x), MAXf(x) is the maximum value of the difference between the attack income and the battle damage. If the maximum value of the fitness function f(x) is not calculated, MAXf...
specific example
[0054] Assume x i ( n ) = 1 0 0 0 0 1 0 1 0 0 1 0 , p m ( n ) = 1 0 0 1 0 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More