

Mechanical arm clamping device
A technology of clamping device and mechanical arm, applied in the field of mechanical arm, can solve the problems of complex structure, reduced reliability of rigidity index, high manufacturing and maintenance costs, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
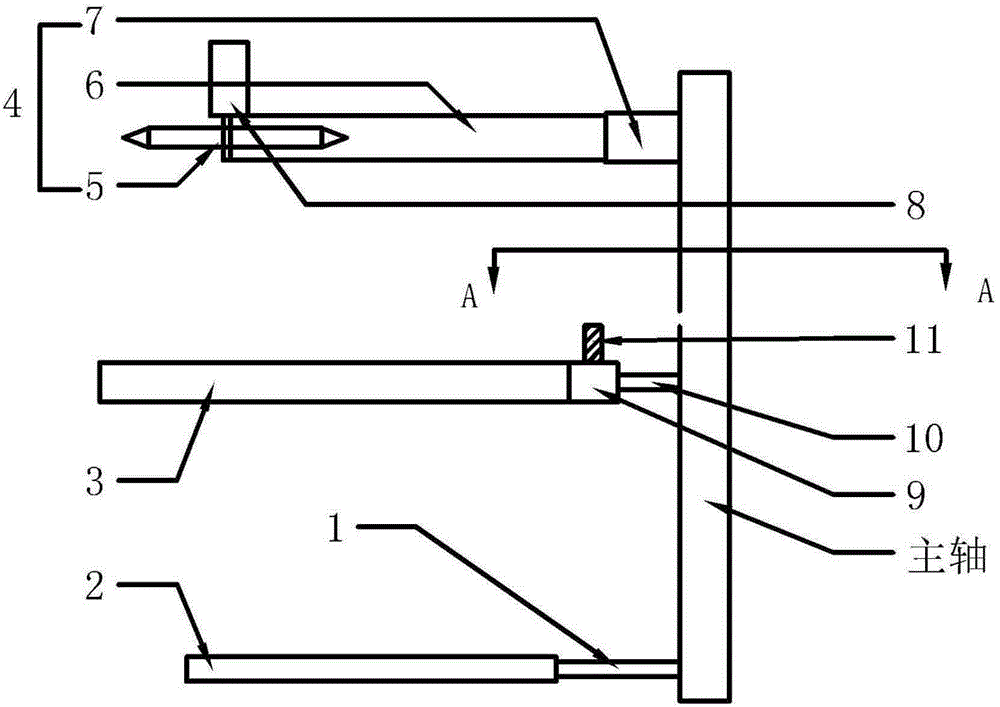
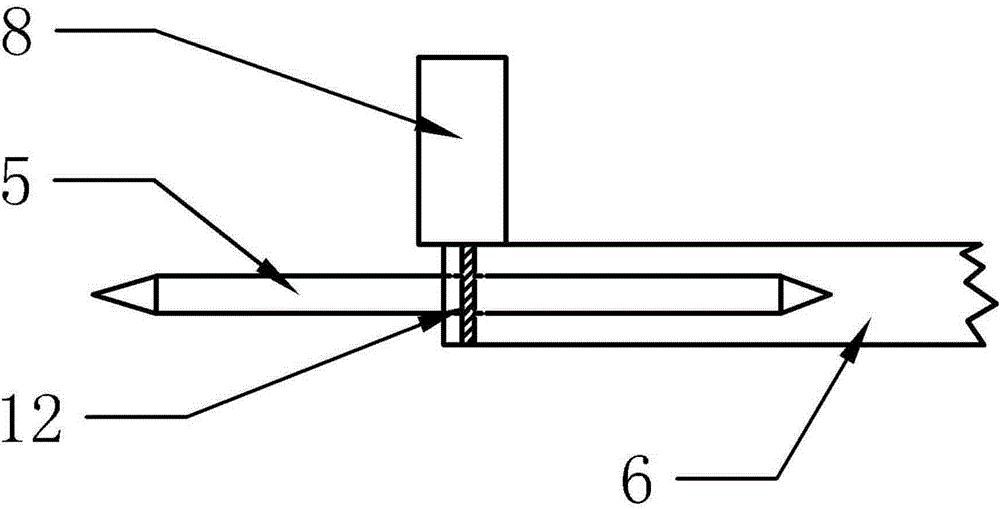
[0019] refer to Figure 1-3 , a specific embodiment of the present invention includes a main shaft and a cutting finger 4 , a clamping finger and a tray 2 installed sequentially from top to bottom. The cutting finger 4 has a cutting arm 6, one end of the cutting arm 6 is connected to the main shaft, the other end is equipped with a cutting wheel 5, the center of the cutting wheel 5 has a rotating shaft 12, and a cutting motor is detachably connected above the rotating shaft 12 8. The cutting arm 6 is connected to the main shaft through the hydraulic drive 7, so that the cutting wheel 5 can move horizontally.
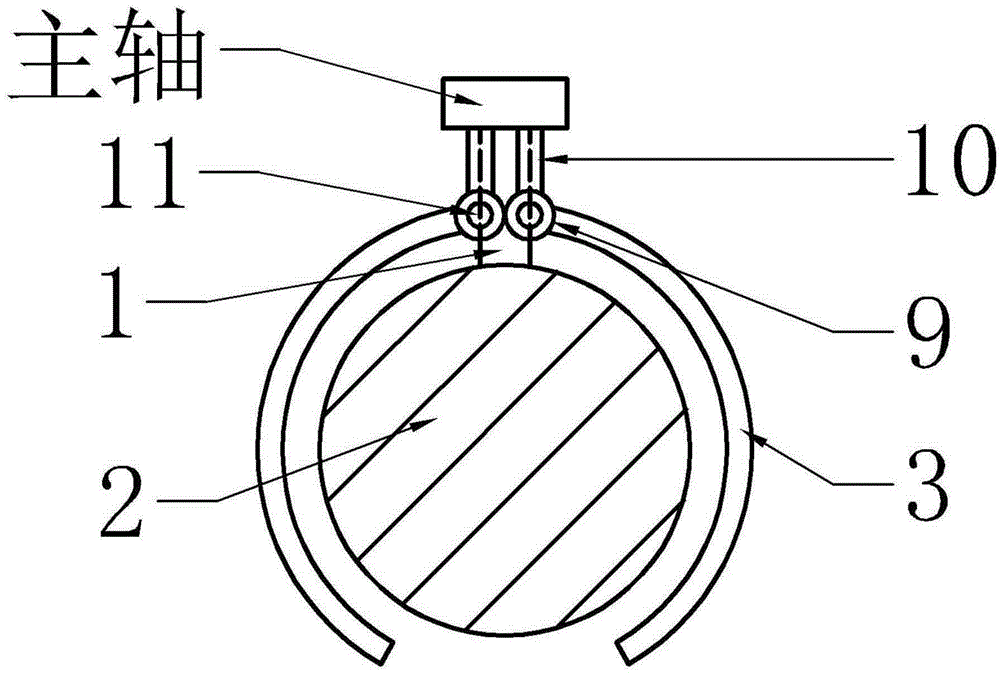
[0020] The clamping finger has two arc-shaped finger bodies 3 , and the ends of the finger bodies 3 close to the main shaft are respectively connected to the rotating shaft 9 and connected to the main shaft through the clamping finger connecting rod 10 . The clamping finger has a pressure sensing device, which is used to adjust the strength of the clamping finger and pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More