

Two-foot straight leg walker provided with upper body
A walking device and upper body technology, applied in toys, rehabilitation medicine, and military applications, can solve the problems of failing to realize semi-passive walking, unable to simulate the lateral movement process of human walking, and not suitable for practical applications, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
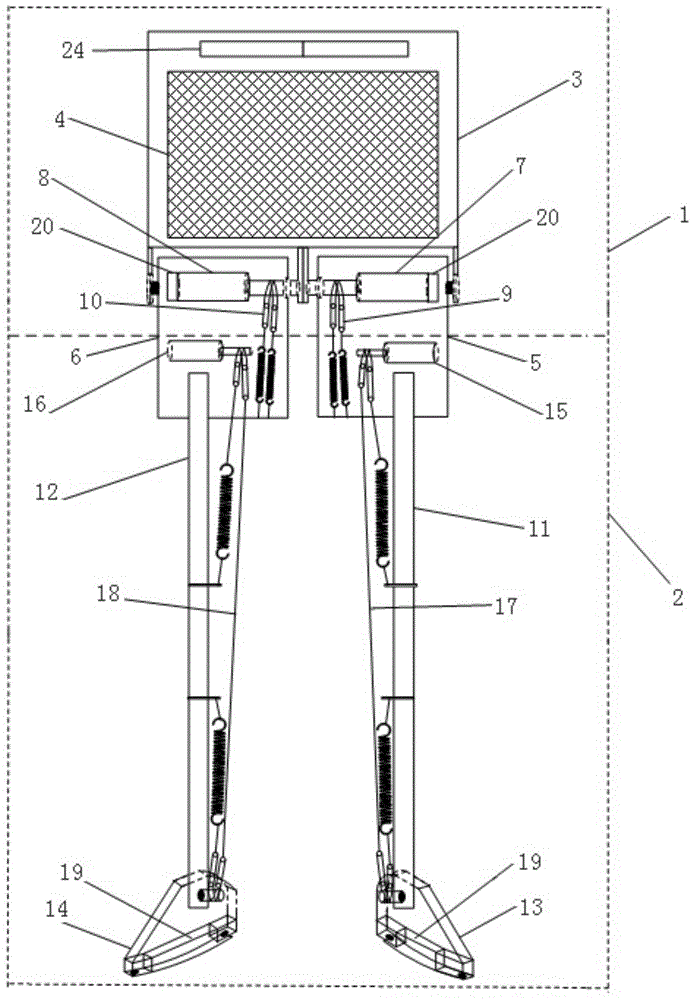
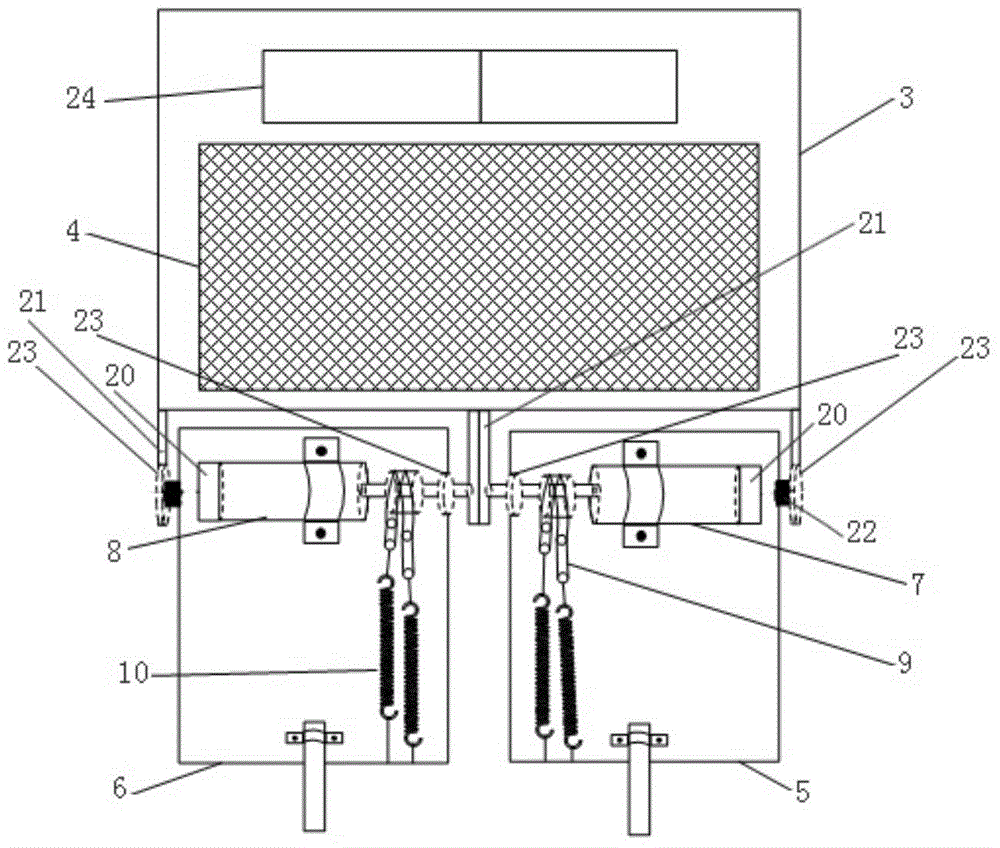
[0015] see figure 1 with figure 2 , a straight leg walker with two feet and upper body, comprising a hip and upper body connection part 1 and a hip and leg foot connection part 2; the hip and upper body connection part 1 includes an upper body 3, which is fixed in the upper body 3 The main control circuit board 4, the hip L 5 and the hip R 6 connected with the upper body 3 respectively, the inside of the hip L 5 and the hip R 6 are respectively fixedly provided with the motor M17 and the motor for controlling the swing angle of the hip and the foot M28, and spring system L 9 and spring system R 10; said hip and leg-foot connection part 2 includes leg L 11 and leg R 12 fixedly connected with hip L 5 and hip R 6 respectively, leg The bottom end of L 11 and leg R 12 is hinged with foot L 13 and foot R 14, and is provided with motor A 15 inside hip L 5 and hip R 6 to control the lifting and lowering of foot L 13 and foot R 14 and motor B 16, and spring system A 17 and spring sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More