

Power line inspection robot control method in windy environment
A technology for inspection robots and power lines, applied in non-electric variable control, vehicle position/route/height control, position/direction control, etc., can solve problems such as small size, reduce the possibility of danger, and improve safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with accompanying drawing.
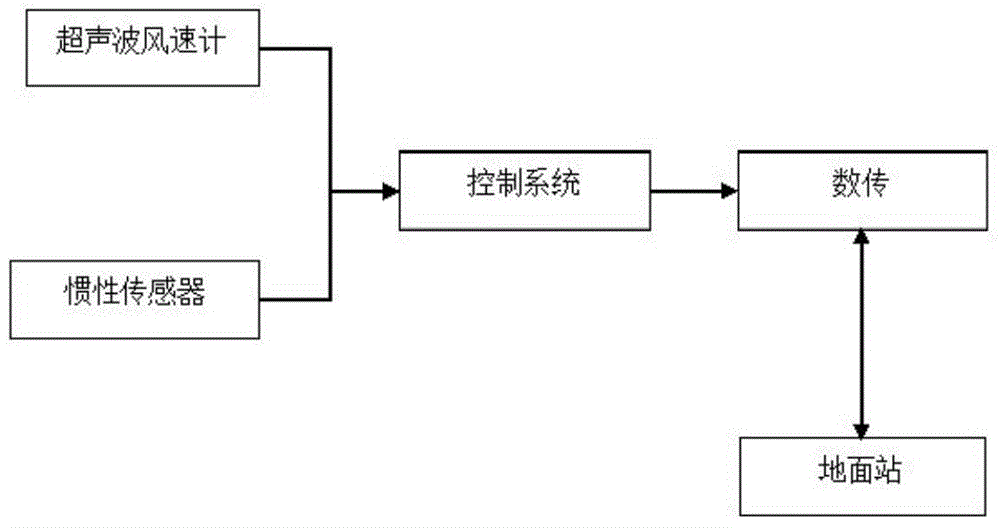
[0016] See figure 1 , figure 2 , a control method for a power line inspection robot in a strong wind environment. The present invention measures the real-time wind speed vector by installing a wind speed sensor on the inspection robot, and feeds back the measured data to the inspection robot control system; the inspection robot's The control system will pass the wind speed measured by the wind speed sensor back to the control system through the built-in algorithm and subtract it from the current walking speed vector to find the exact value of the wind speed in the current natural environment, and send this value back through the digital transmission station. Ground station, provided to the operator.
[0017] In the present invention, the user sets multiple thresholds of wind speed through the ground station, and sets the response action of the line patrol robot when the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More