

Underactuated traveling device and control method thereof
A walking device and underactuated technology, applied in the field of robotics, can solve the problems of increased difficulty in building physical prototypes and control algorithms, complex models, etc., and achieve the effect of simple structure, large application space, and large parameter attraction field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
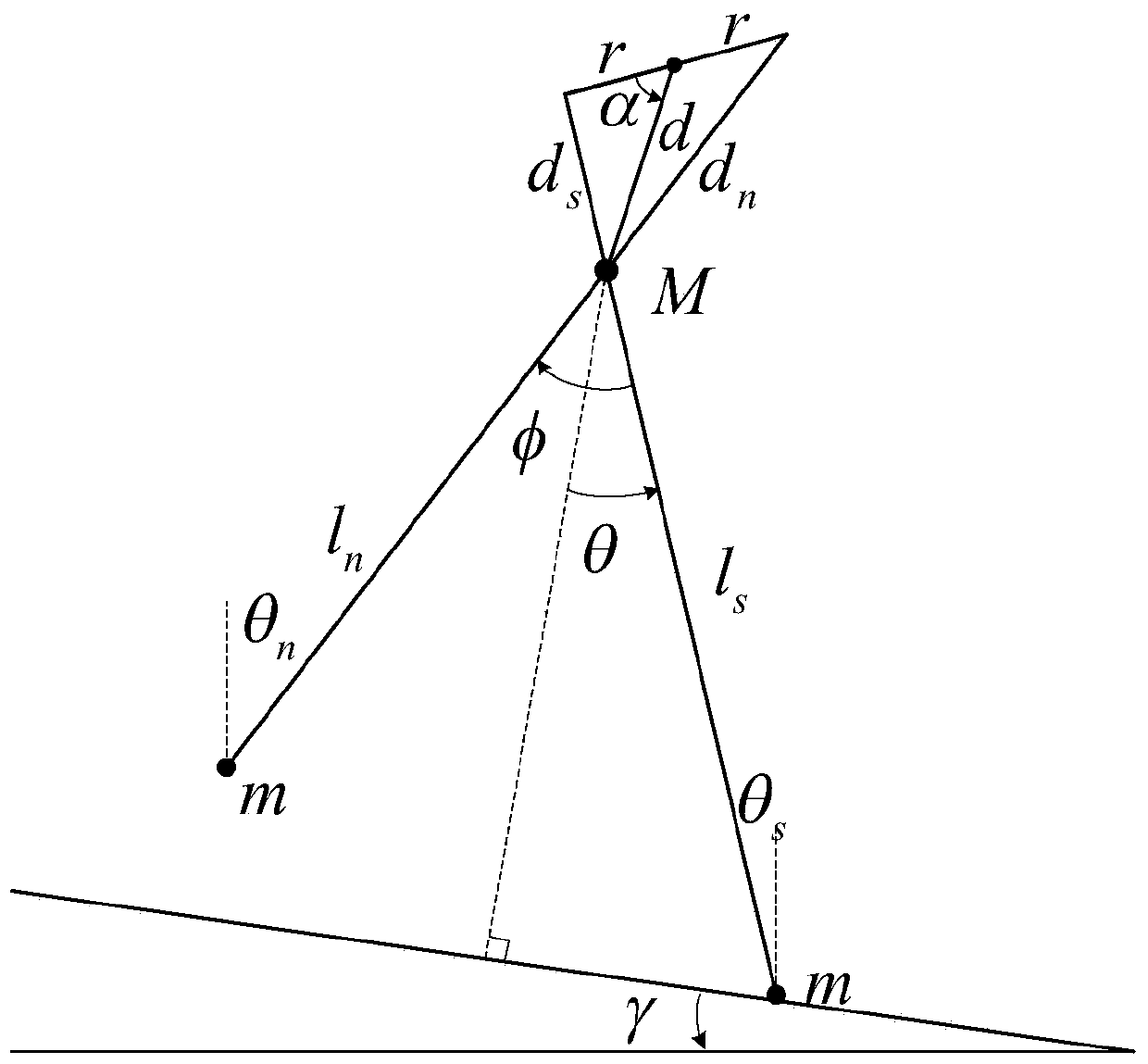
[0022] figure 1 It is a schematic diagram of the physical model of the present invention, as shown in the figure, the length of the crankshaft of the hip is d, the radius of rotation of the crankshaft is r (for changing the telescopic length of the legs and the size of the walking gait), the angle of rotation of the crankshaft is α, the hip The mass center of the upper part is m, the mass center mass of the lower part of the hip is M; the angle between the swing leg and the support leg is φ, the angle between the support leg and the vertical line of the ground is θ; the elastic coefficient of the torsion spring of the double torsion joint is k; The slope angle is γ.
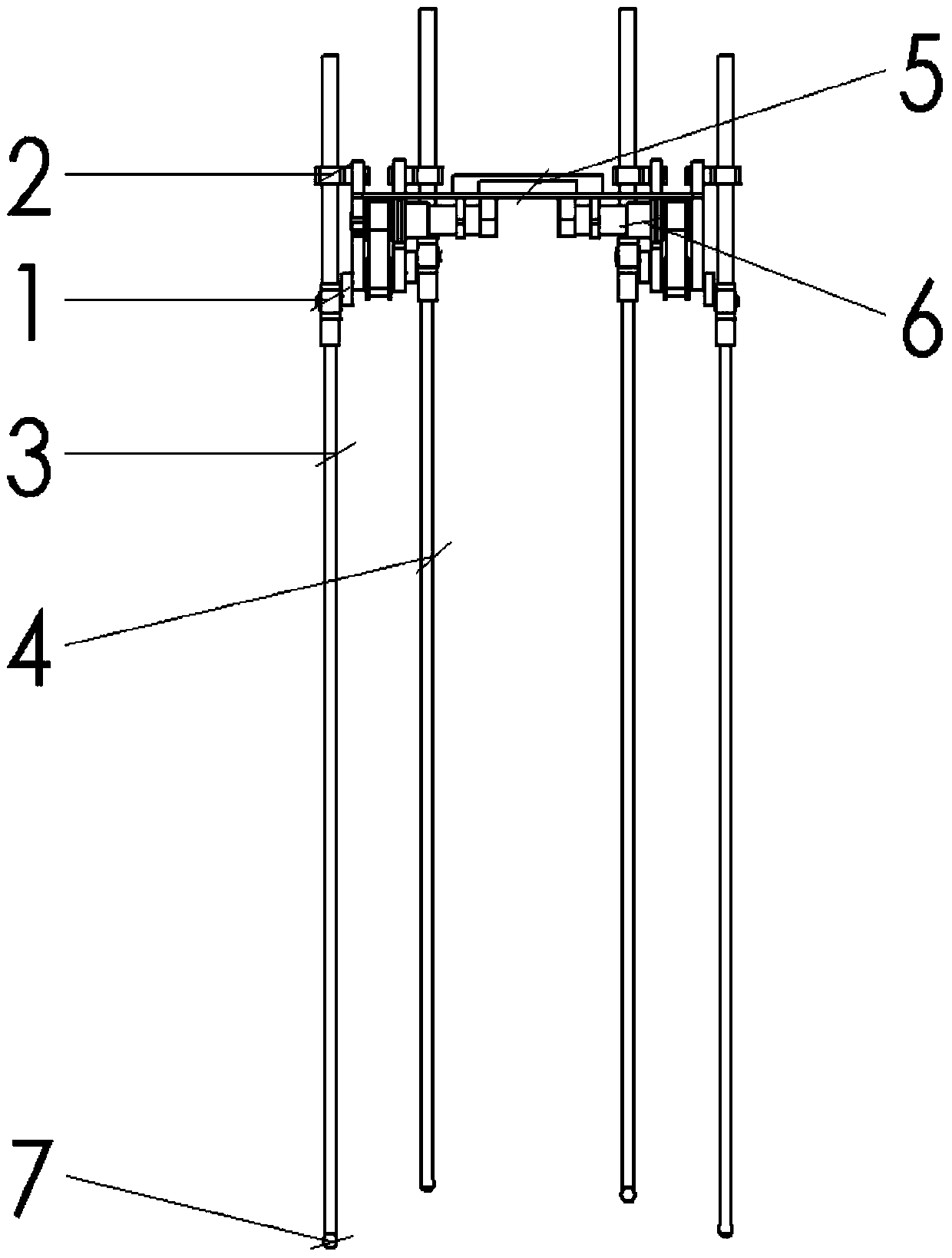
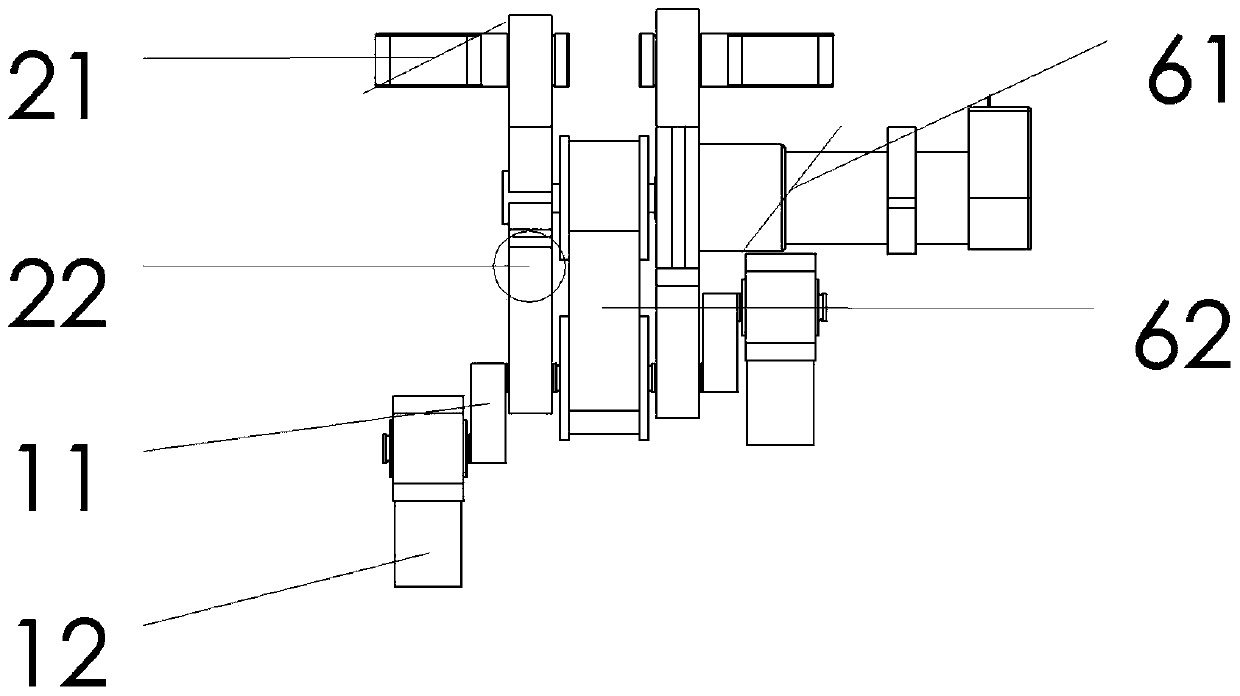
[0023] Such as figure 2 , 3 As shown, the whole device includes: a platform; a hip, including a crankshaft rocker 1, a twist joint 2, a rocker 11, a rotating cross 12, a l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More