Agricultural vehicle autonomous navigation steering control method
A technology for agricultural vehicles and steering control, applied in adaptive control, general control system, two-dimensional position/channel control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
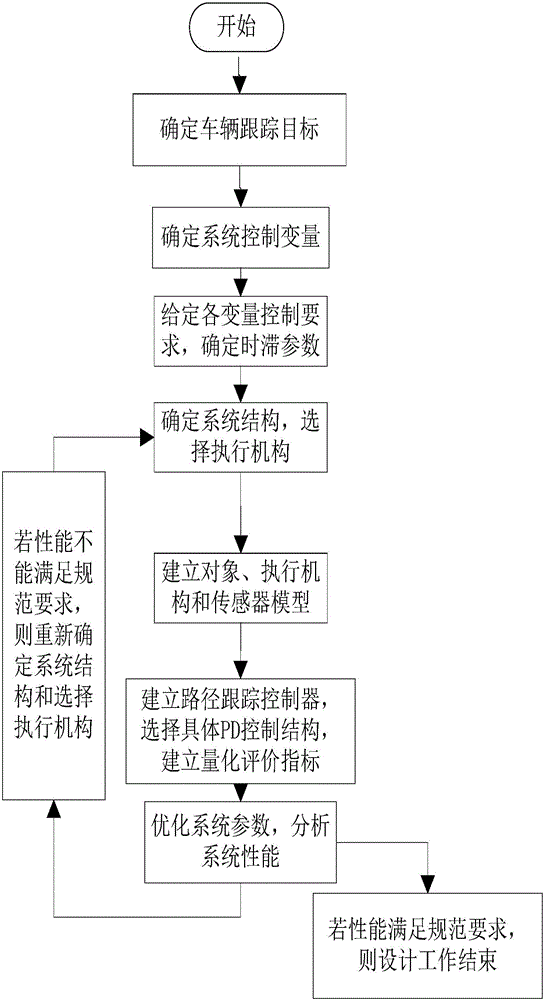
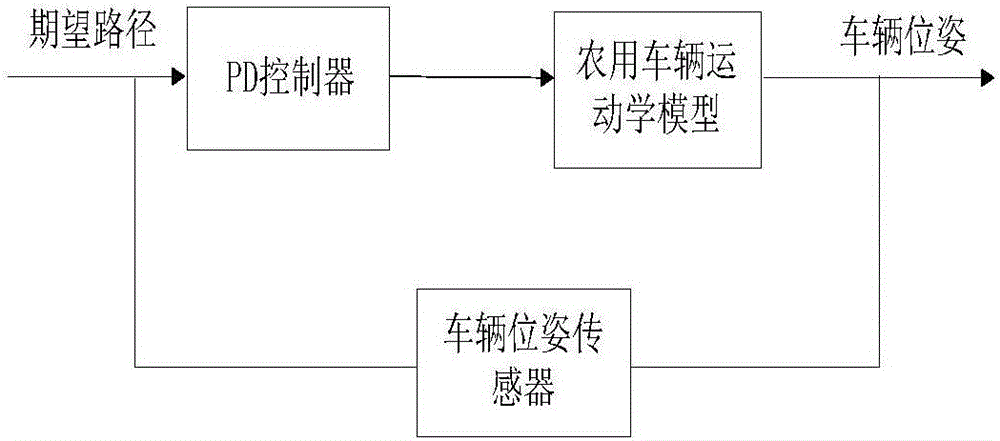
[0118] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
[0119] Firstly, the tables involved in the present invention will be shown one by one below.
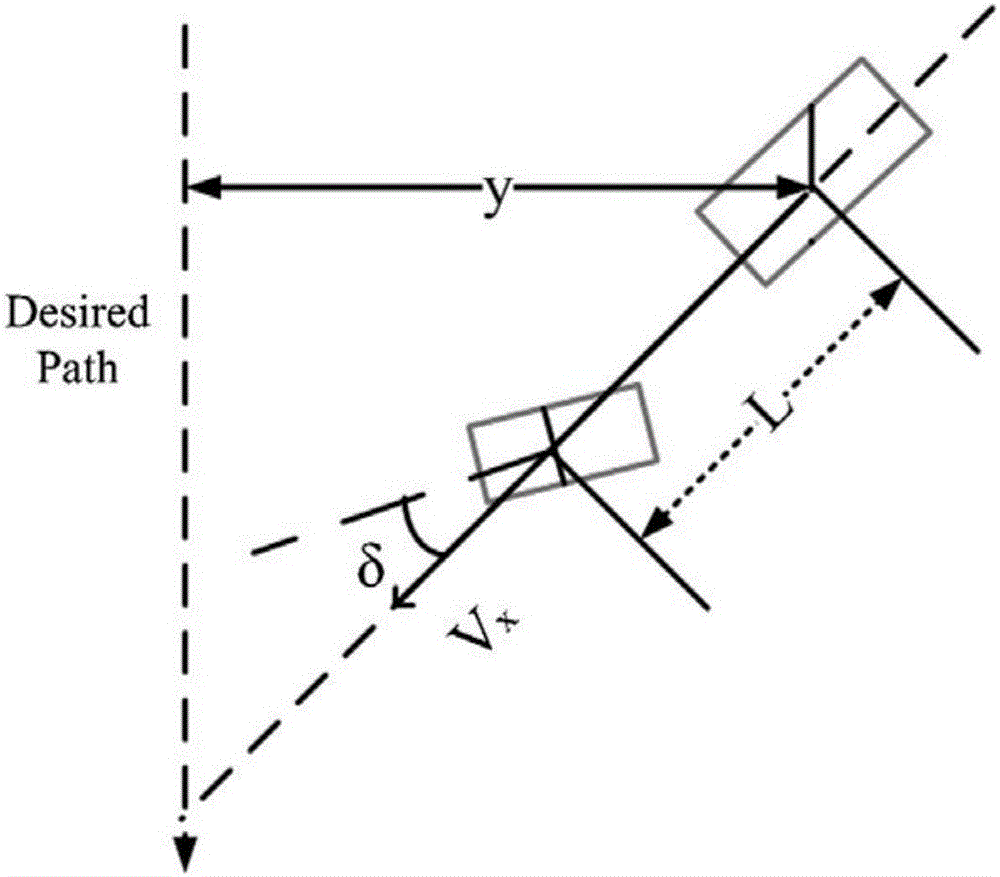
[0120] The kinematic state equation of the vehicle;
[0121] y · Ψ · δ · = 0 V x 0 0 0 V x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More