

Deformable multi-mode ground and air flying robot
A flying robot, multi-modal technology, applied in the field of mobile robots, can solve the problems of inability to complete ground operations, increase the self-weight of the robot, and small size of the robot bird, and achieve the effect of strong multi-task processing capability, low power consumption, and reduced self-weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and features of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
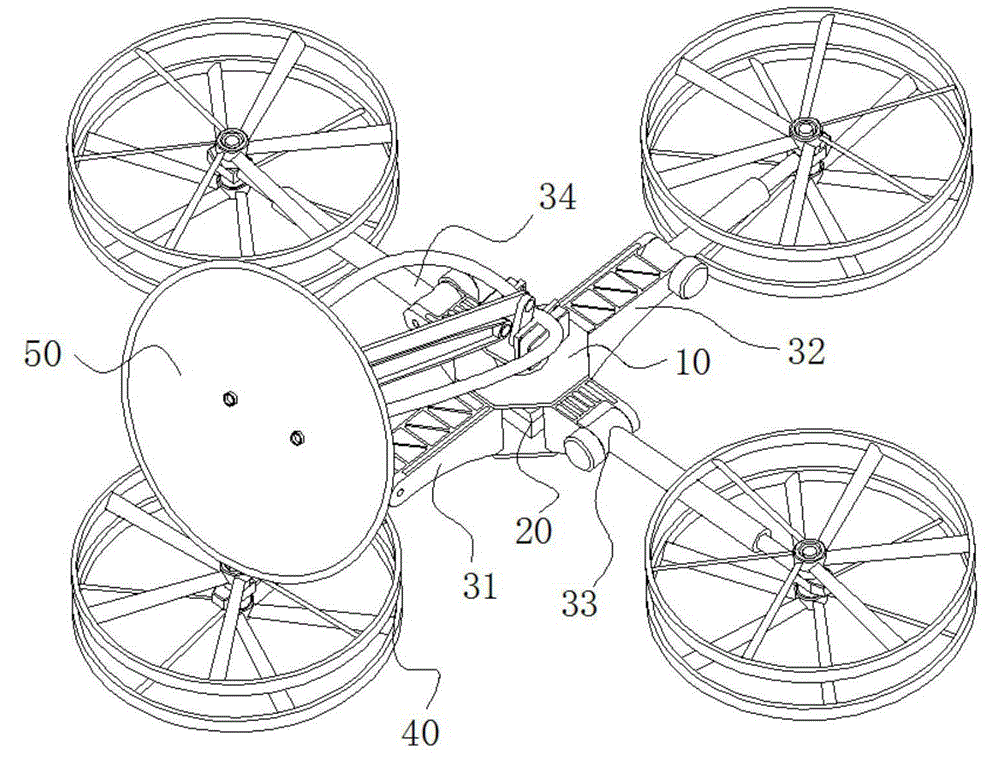
[0043] Such as figure 1 Shown, the deformable multimodal ground-air flying robot of the present invention comprises:
[0044] Body 10, autopilot 20, wing arm device 30, hub device 40 and adsorption device 50;
[0045] Four sets of wing arm devices 30 are installed in a cross shape on the body 10, and the four sets of wing arm devices 30 arranged in a cross shape are divided into front wing arm devices 31, rear wing arm devices 32, and left wing arm devices 33 of equal length. With the right wing arm device 34, the front wing arm device 31 and the rear wing arm device 32 are located on the same axis, and the left wing arm device 33 and the right wing arm device 34 are located on the same axis.
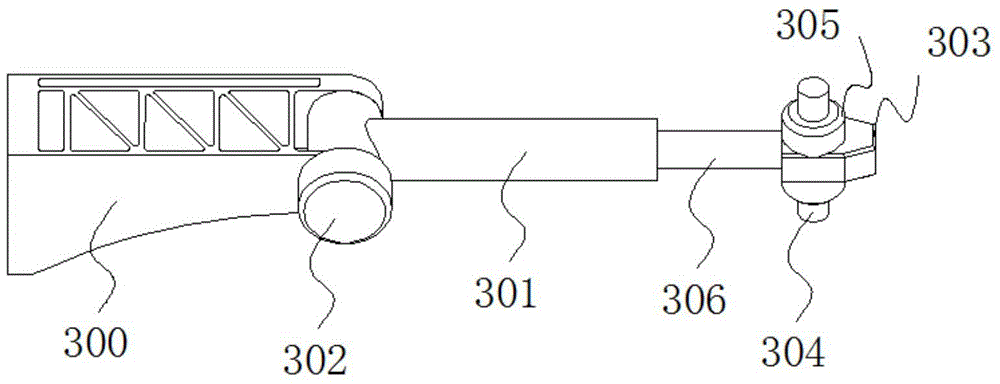
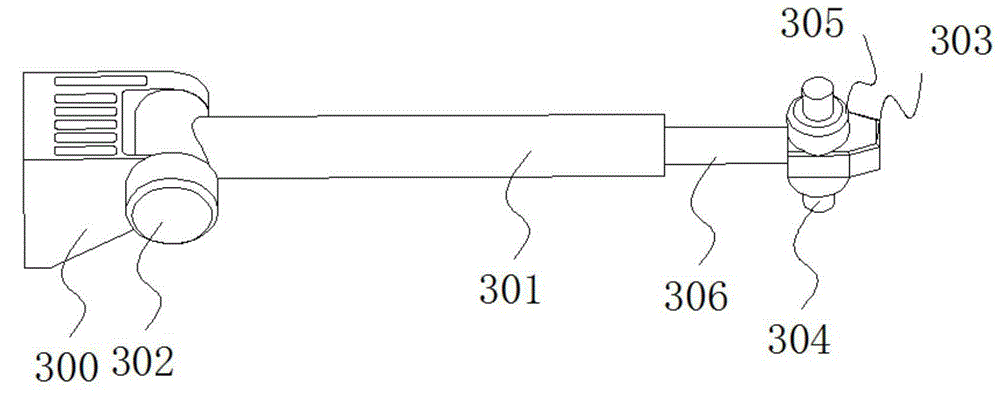
[0046] Such as Figure 2a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More