

Moving substrate track planner achieved based on nonlinear optimization method
A nonlinear optimization and trajectory planning technology, applied in the field of communication, can solve the problems of trajectory tracking error, too many optimization variables, unable to meet the real-time requirements of complex tasks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
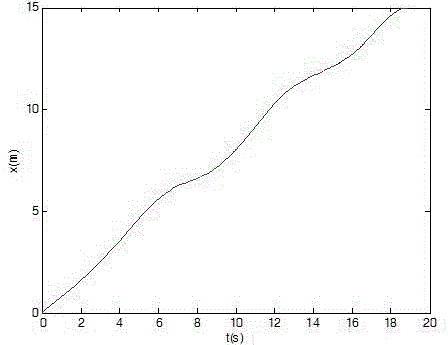
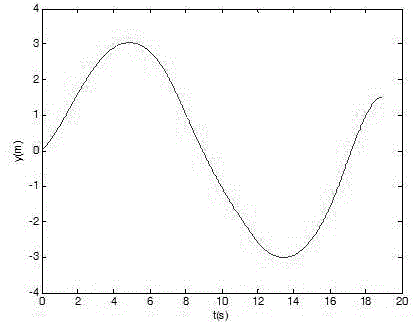
[0067] A cubic b-spline curve is used to parameterize the trajectory, and the entire motion time is linearly scaled to meet the constraints on velocity and acceleration, and then the trajectory that satisfies the constraints is solved through nonlinear optimization;
[0068] Let the task output be the waypoint :
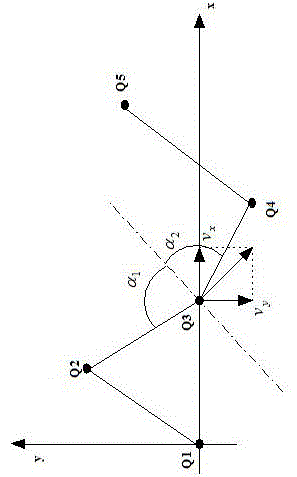
[0069] ① First determine the speed Direction of : Connect all path points with line segments, the speed directions of the first and last path points are determined by the direction of the first line segment and the last line segment respectively. The velocity direction of other points is determined by the direction of the perpendicular to the corresponding angle bisector. Finally, the projection of the velocity of each point in the x-axis and y-axis direction is decomposed into , so that the path point convert to ;
[0070] ② Use B-spline to parameterize the trajectory: the path point Depend on Indicates that the corresponding speed Depend on expre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More