Decoupled two-translation one-rotation parallel robot
A robot and translation technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of few types of decoupled parallel robots, and achieve the effect of high rigidity, convenient working space, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
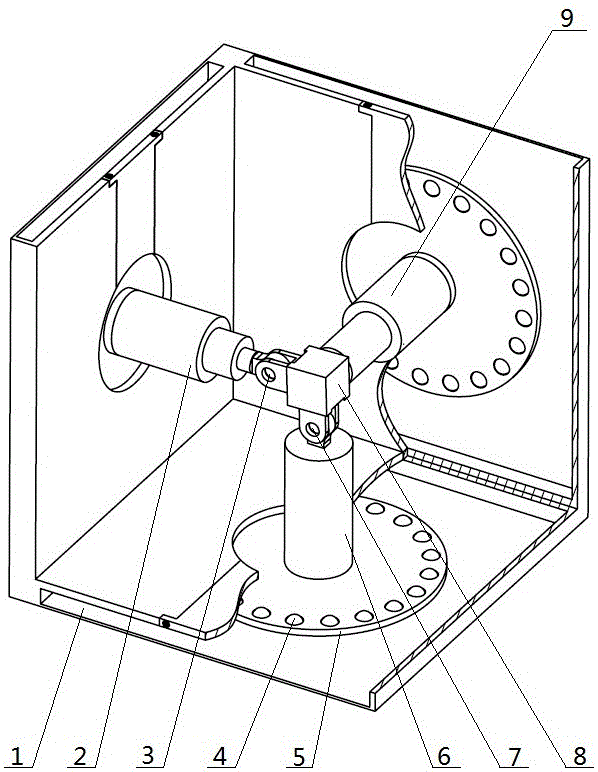
[0010] The fixed platform 1 has three mutually orthogonal planes, and each plane has a rectangular hollow structure. The disc slider 5 is movably embedded in the rectangular hollow structure of the fixed platform 1 through the balls 4 embedded in the edge, and is connected with the fixed platform. 1 together form a planar motion pair, the first branch chain is a first telescopic rod 2, one end of the first telescopic rod 2 is connected to the motion table 8 through the first rotating pair 3, and the other end is connected to one side of the disc slider 5 Fixed connection, the second branch chain is a fixed-length rod 6, one end of the fixed-length rod 6 is connected with the motion table 8 through the second rotating pair 7, the other end is fixedly connected with one side of the disc slider 5, the third The branch chain is a second telescopic rod 9, one end of the second telescopic rod 9 is affixed to the motion table 8, and the other end is affixed to one side of the disc sli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com