

Feet-type robot
A robot and foot-type technology, applied in the field of robots, to achieve the effect of good coordination, simple structure and convenient maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
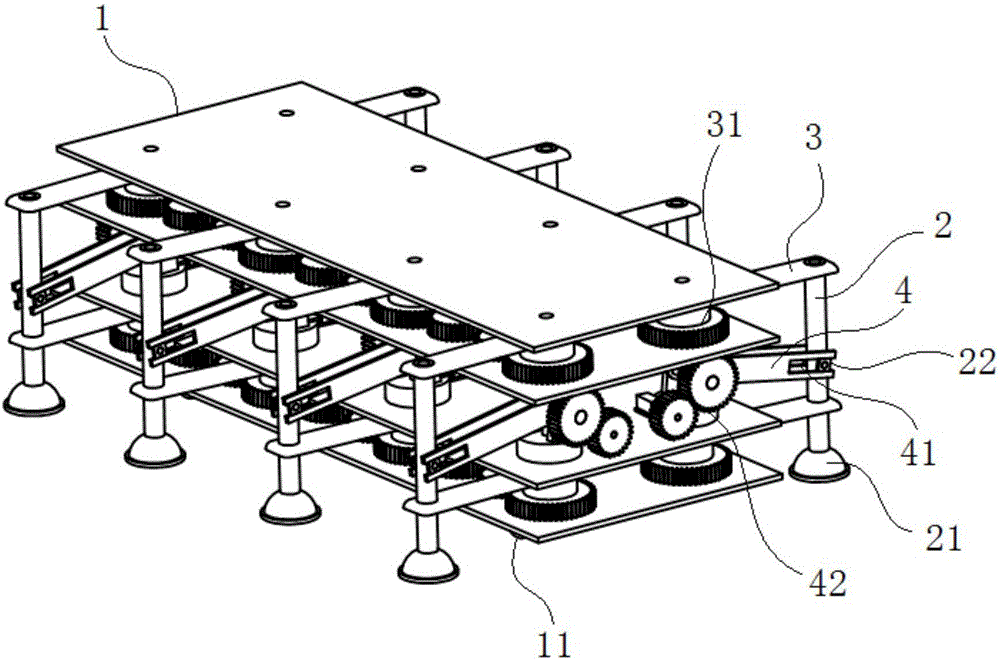
[0025] Such as Figure 1 to Figure 4 As shown, the first embodiment according to the specific embodiment of the present invention is: a foot-type robot, which includes a fuselage 1, a foot 2, a translation swing bar 3 and a foot lift swing bar 4, wherein:
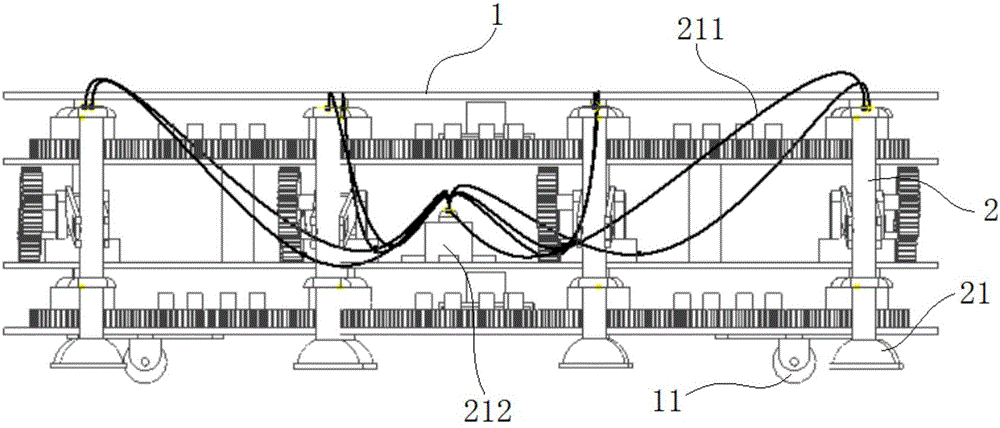
[0026] Such as figure 1 and figure 2 As shown, the bottom of the fuselage 1 is provided with wheels 11 , and the fuselage 1 is supported and moved by the wheels 11 . The foot 2 is in the shape of a hollow rod, the lower end of the foot 2 is provided with a vacuum suction cup 21 , and the upper end of the foot 2 is connected to an air pump 212 through a hose 211 , and the air pump 212 is arranged on the body 1 . Four pairs of feet 2 are sequentially arranged on the fuselage 1 from front to back, and eight feet 2 are arranged on the fuselage 1, and two feet 2 of each pair of feet 2 are symmetrically arranged on the fuselage respectively. 1 on the left and right sides. When the air pump 212 pumps air through the foot 2 to...
Embodiment 2
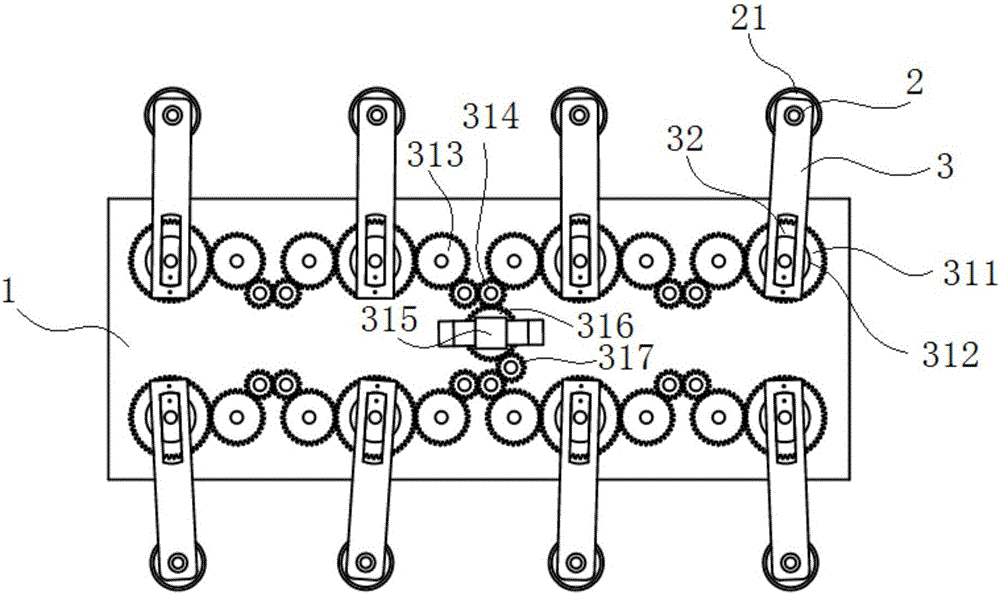
[0043] On the basis of Example 1, further, as figure 1 As shown, the slider 22 is arranged in the middle of the foot 2, so that the foot lifting swing rod 4 is connected to the middle of the foot 2; and the upper and lower parts of the foot 2 are respectively sleeved on the outer ends of the two translation swing rods 3 ; The front and rear swing mechanism 31 of the upper translation swing rod 3 and the front and rear swing mechanism 31 of the lower translation swing rod 3 are respectively powered by two first power mechanisms. The fuselage 1 is respectively provided with three layers of pallets, the upper and lower two layers of pallets are respectively used to set the upper and lower layers of the front and rear swing mechanism 31 and the first power mechanism, and the middle pallet is used to set the up and down swing mechanism and the second power mechanism . And the upper end of the fuselage 1 is provided with a cover plate for protecting the fuselage 1 and installing th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More