

Pole-climbing robot with grippers controlled by cams
A technology of cam control and mechanical claws, which is applied in the field of pole-climbing robots, can solve the problems of not being able to grasp the poles, and achieve the effect of simple structure and convenient installation and disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
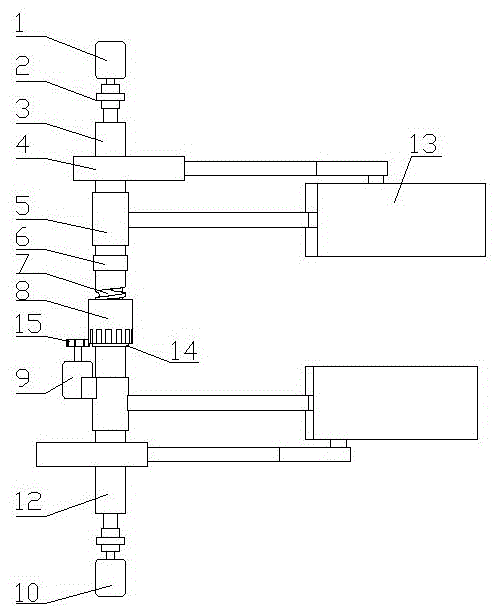
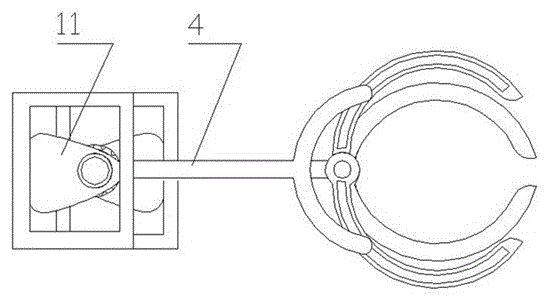
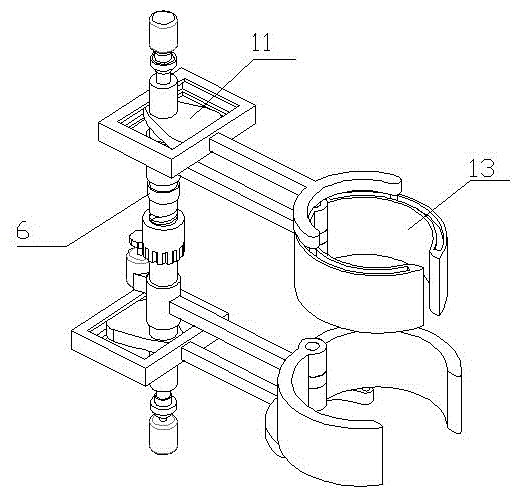
[0012] The pole-climbing robot of the present invention is composed of a lifting mechanism, a clamping mechanism, an electric control part, a bearing, and a clutch. Described lifting mechanism is made up of the 3rd motor 9, gear lead screw nut 8, leading screw 7, upper half shaft 3 and lower half shaft 12, gear lead screw nut 8 is fixed on lower half shaft 12 with bearing 14, leading screw 7 is used for Clutch 6 is fixed on upper axle shaft 3, and gear 15 is housed on the rotating shaft of the 3rd motor 10, and it is fixed on frame after the gear engagement on the gear lead screw nut 8, is used for the rising or descending action of control robot. The clamping mechanism is composed of two identical upper mechanical claws and lower mechanical claws, both of which include a cam push rod guide 4, a mechanical claw connecting rod 5, a cam 11, and a mechanical gripper 13, and the cam 11 is installed on the upper and lower shafts One end of the cam push rod guide 4 is a push rod fra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More