

A Path Planning Method for Mobile Robots Combining Deep Autoencoder and Q-Learning Algorithm
An autoencoder and mobile robot technology, applied in two-dimensional position/channel control, biological neural network models, etc., can solve a lot of time and effort problems, and achieve the effect of improving capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Combine below Figure 4~7 The present invention is described further:
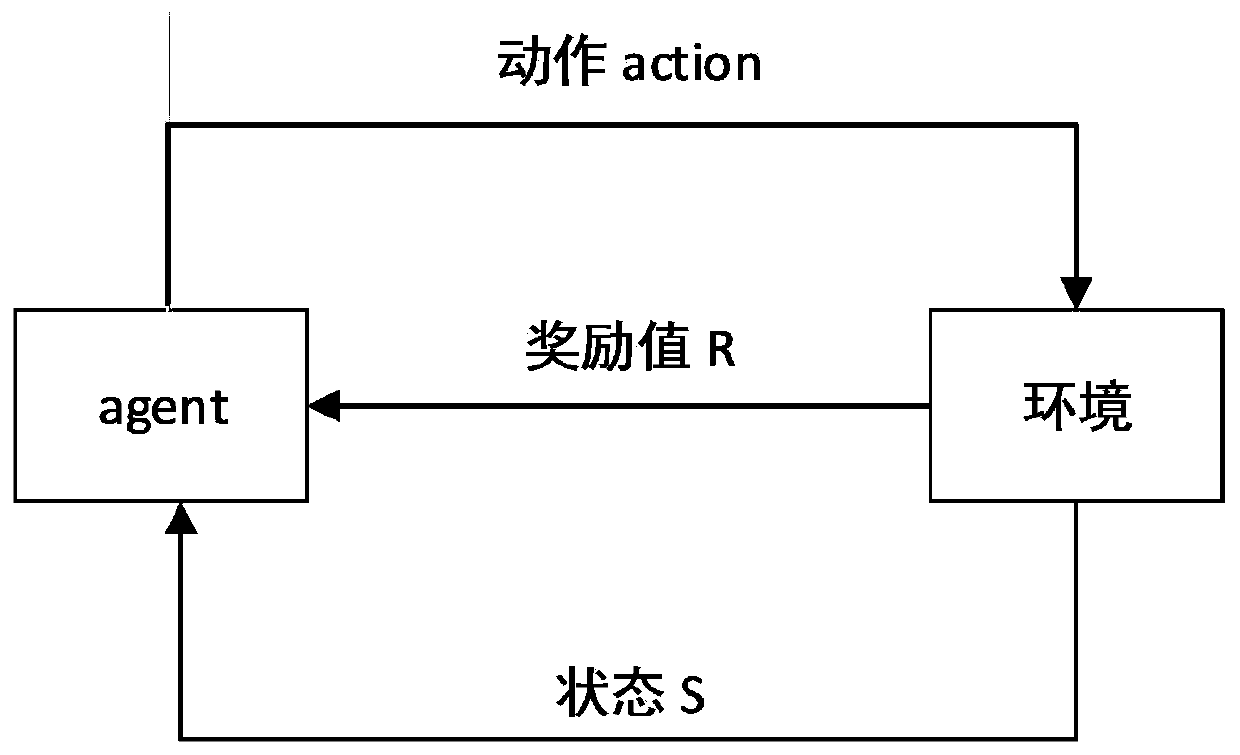
[0023] The overall system block diagram is as Figure 4 As shown, the deep autoencoder processes the environment information of the robot (that is, the image of the environment where the robot is located) to obtain image feature data; the obtained environment feature data is fitted by the BP neural network to obtain the position of the robot, and realizes the recognition of the surrounding environment. cognition, and then get the corresponding reward value R; the Q learning algorithm changes the corresponding Q value through the reward value R, and the Q learning algorithm selects the action to be performed by the mobile robot according to the Q value, so that the position of the robot changes, so that its The surrounding environment changes to realize interaction with the environment.
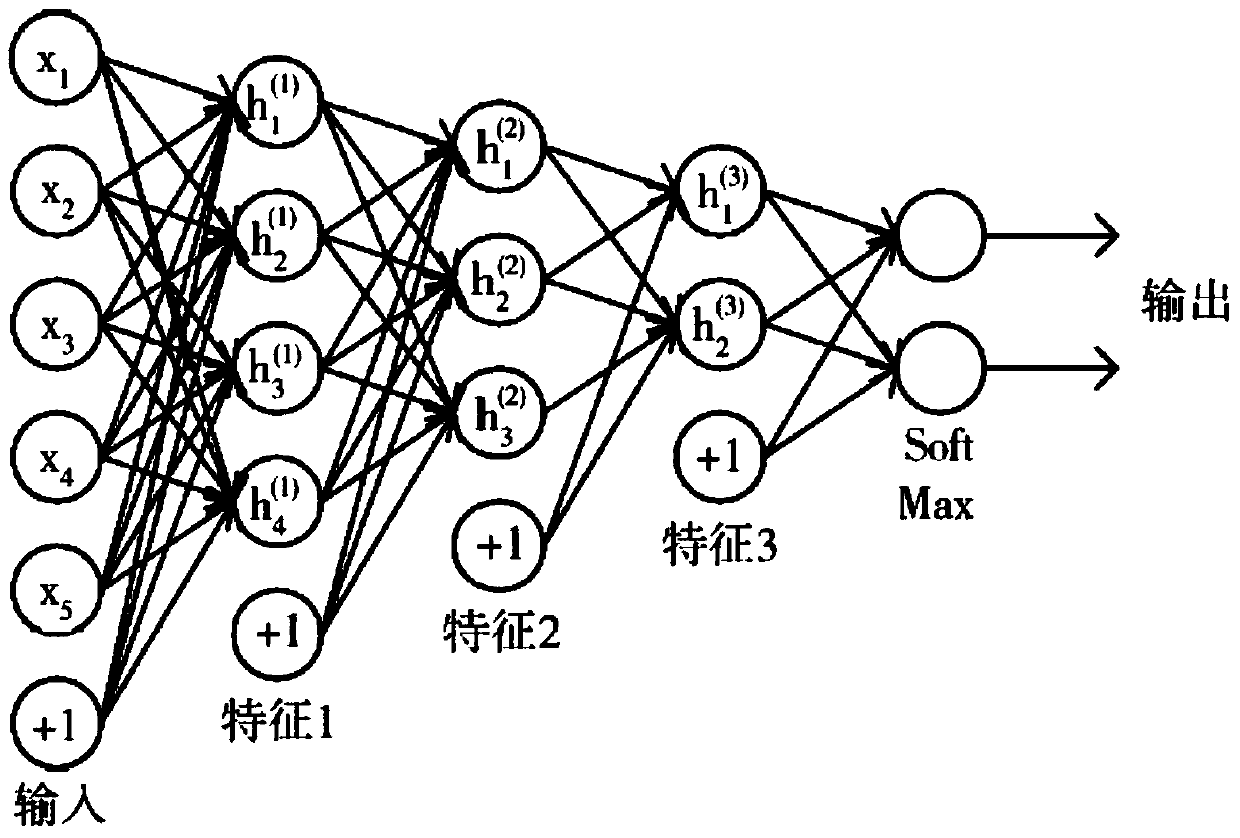
[0024] The parameter update process of each layer of deep autoencoder network is as follows: figure 2 , the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More