

Plug-in type rapid repetitive controller and control method
A repetitive controller, repetitive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of slow dynamic response of repetitive controller, complicated design method, slow dynamic response, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051]The present invention will be further described below in conjunction with the accompanying drawings.
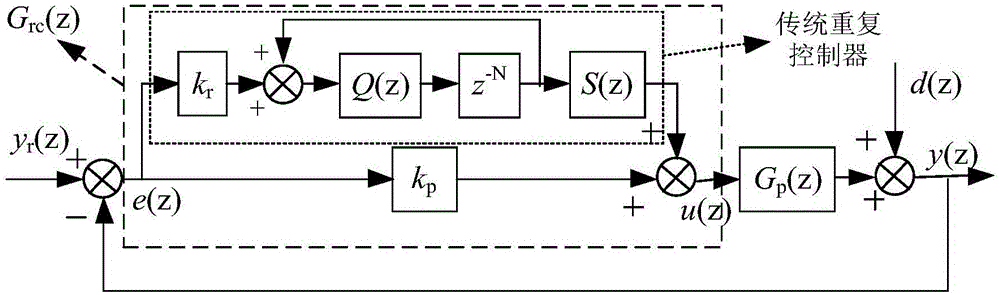
[0052] Such as figure 1 As shown, the plug-in fast repetitive controller of the present invention includes a feedforward gain module, a repetitive control gain module, a positive feedback gain module, two adding loops, an internal model constant module or an internal model low-pass filter, and an internal model delay module , compensator module, two addition loops are respectively the first addition loop and the second addition loop, wherein, the input end of the repeat control gain module is used as the input end of the repeat controller and the input end of the feedforward gain module, and the repeat control gain module The output terminal of the first addition loop is connected to the input terminal of the first addition loop, and the output terminal of the first addition loop is connected to the input terminal of the internal model constant module or the internal mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More