Stability determination method of non-linear active-disturbance-rejection control system
A technology of active disturbance rejection control and system stability, applied in the field of automation, can solve problems such as complex derivation process, complex system motion, and difficulty in popularization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
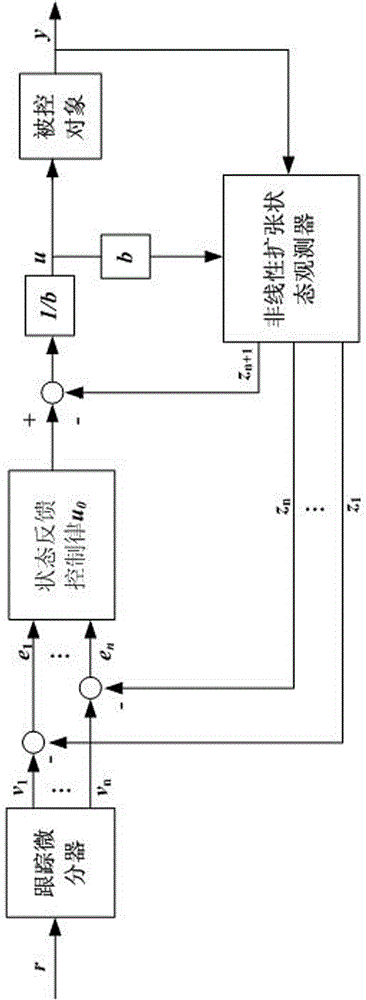
[0110] Combine below Figure 1-Figure 3 And embodiment further illustrates the present invention.
[0111] Assuming that the input r of the tracking differentiator in A1 is 0, then the output v of the tracking differentiator i (i=1,2,...,n) are all 0;
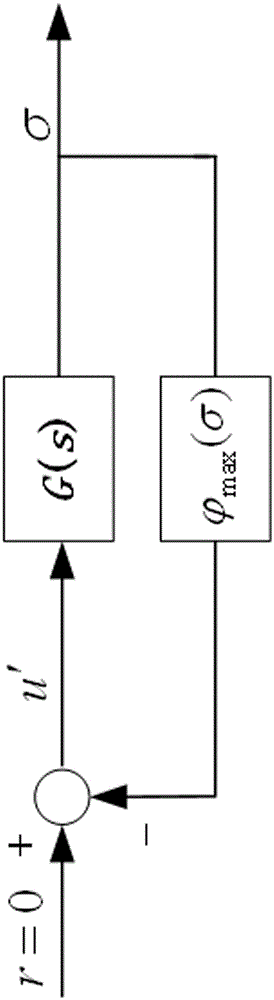
[0112] Taking the stability analysis of the second-order nonlinear active disturbance rejection control system composed of the second-order controlled object and the nonlinear active disturbance rejection controller as an example, the application process of the present invention in practice is described.
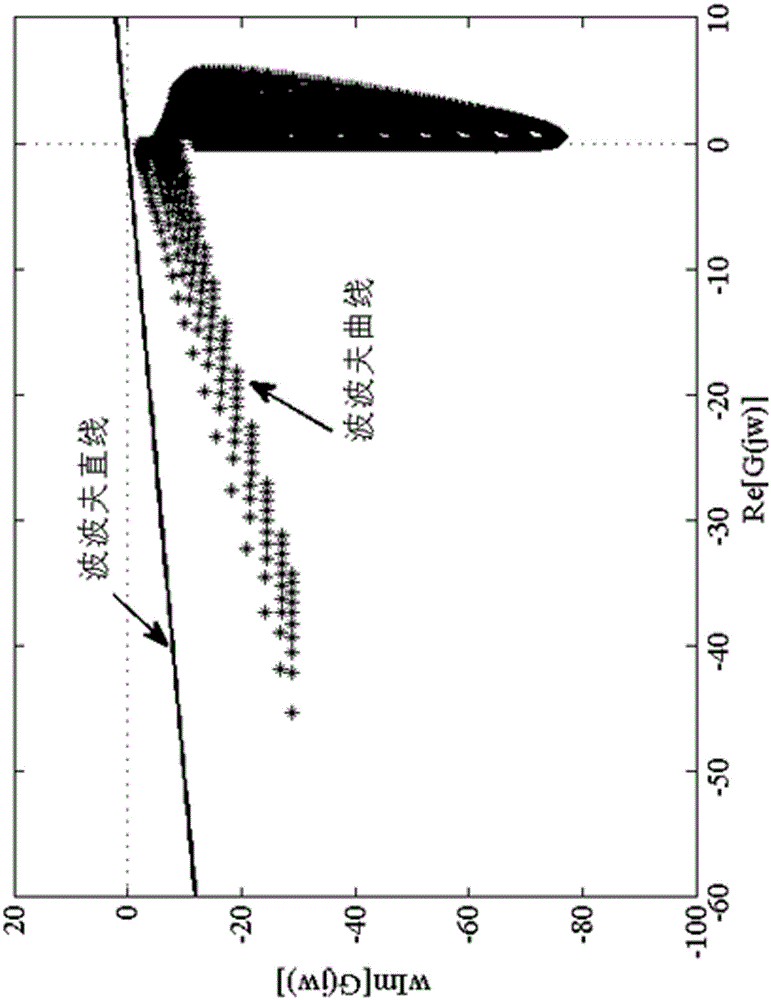
[0113] Stability Analysis of Nonlinear Extended State Observer Based on Routh Criterion.
[0114] Taking a second-order linear steady plant as an example, its mathematical model is as follows:
[0115] x · 1 = x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



