

Method for controlling position and speed on the basis of high-order S motion trajectory
A motion trajectory and speed control technology, applied in digital control, electrical program control, etc., can solve problems such as poor portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
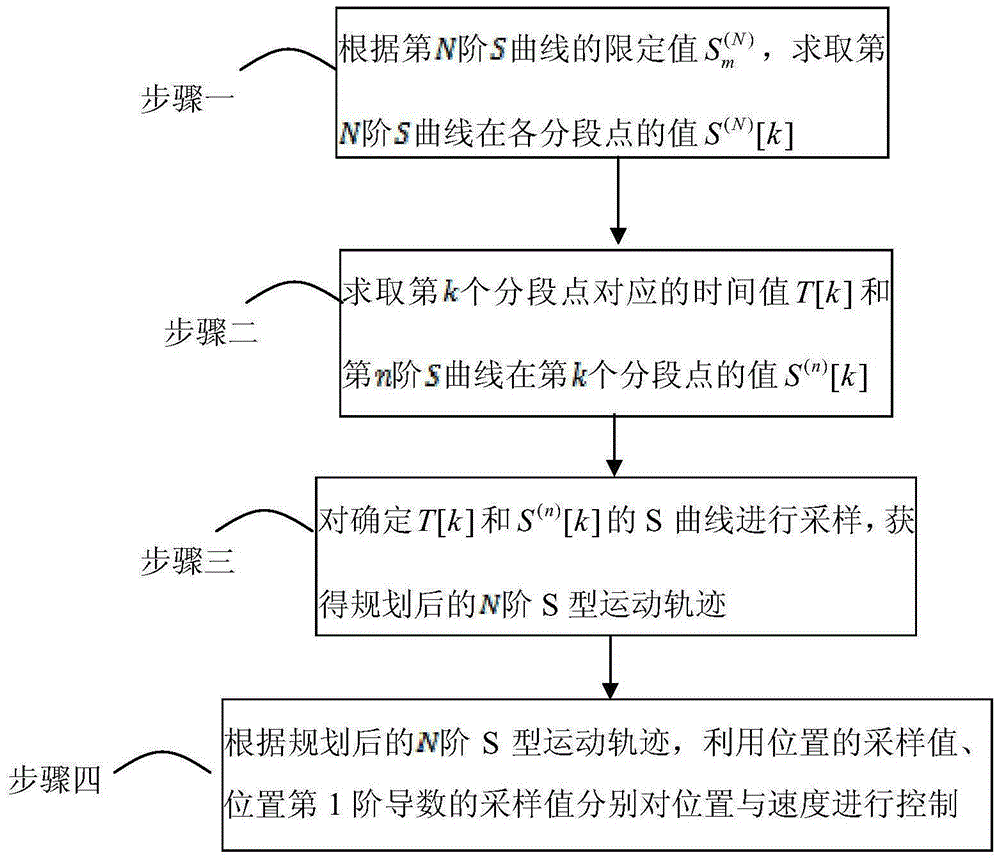
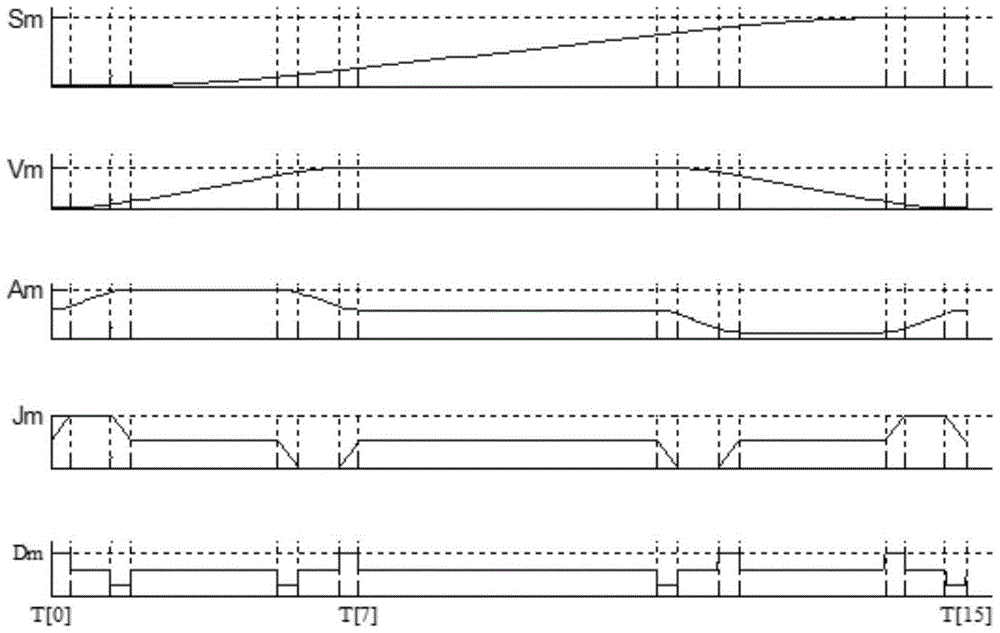
[0040] combine figure 1 and figure 2 Describe this embodiment, the position and speed control method based on the high-order S-shaped motion track described in this embodiment, the high-order S-shaped motion track of this embodiment is a 4th-order S-curve, and the position and speed of the 4-order S-curve (position- Derivative), acceleration (second derivative of position), first derivative of acceleration (third derivative of position) and second derivative of acceleration (fourth derivative of position) are respectively and
[0041] The 4th order S-curve has 2 4 = 16 segmentation points, assuming that the time value corresponding to the kth segmentation point is T[k], the values of each stage curve at the kth segmentation point are S[k], V[k], A[ k], J[k] and D[k], k=0,1,2,,15;
[0042] The method comprises the steps of:
[0043] Step 1: According to the second order derivative of acceleration Find D[k]:
[0044] D[0]=D m ;
[0045] D[1]=0;
[0046] Accordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More