Trajectory control method for redundant mechanical arm
A trajectory control and robotic arm technology, applied in the direction of control using feedback, can solve the problems of large motion overshoot and error, unreasonable motion, uneven overall load, etc., and achieve high calculation accuracy and fast calculation speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
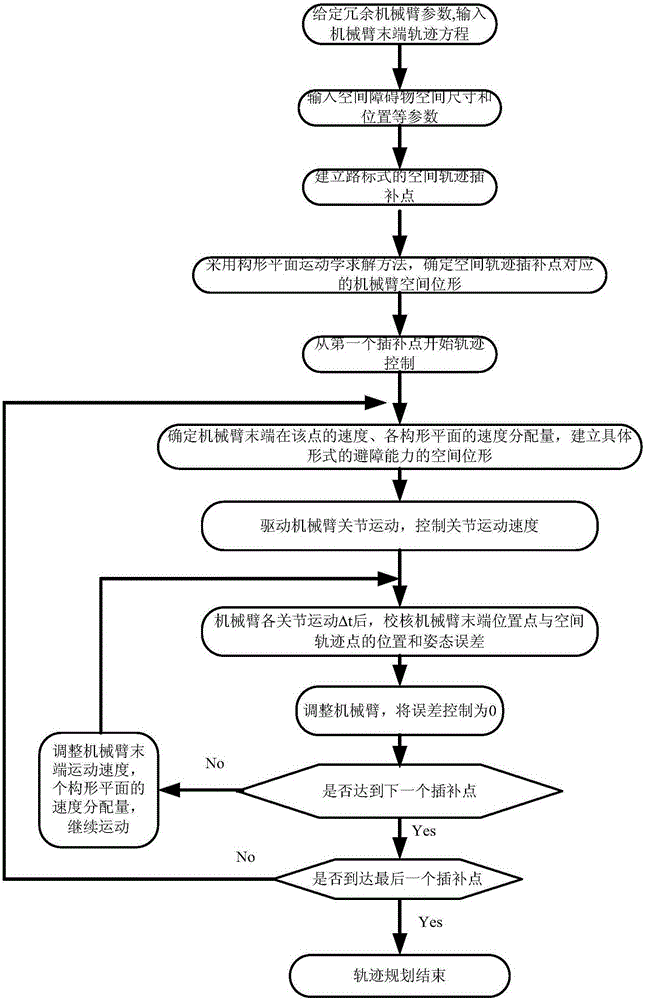
[0030] The present invention will be described in more detail with reference to the accompanying drawings.
[0031] combine figure 1 , the method of the present invention comprises the following steps:
[0032] Step 1: Initial motion planning, according to specific tasks, input the motion trajectory equation of the manipulator, input the structural parameters of the manipulator, establish the kinematics model of the manipulator, and at the same time input space obstacles to obtain the external dimensions and spatial position;
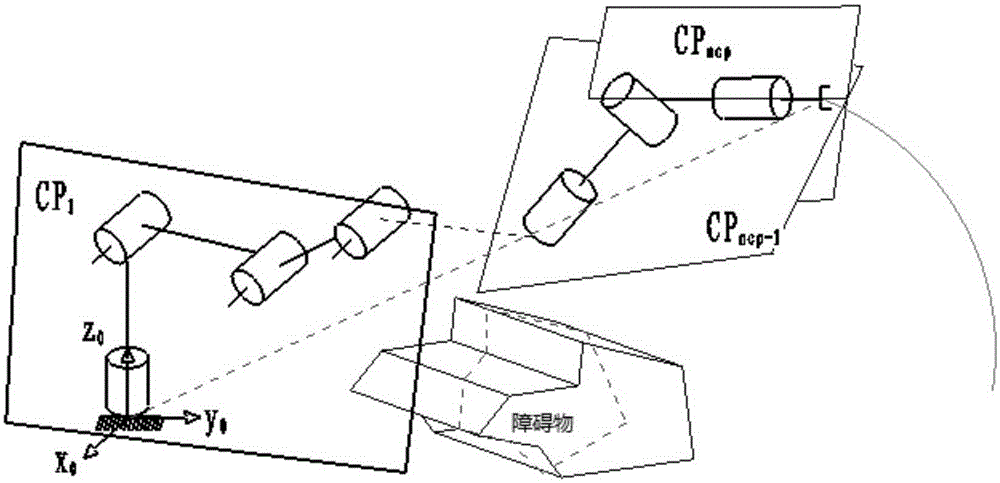
[0033] Step 2: Constrained by the motion trajectory equation of the space manipulator, establish multiple landmark-type space interpolation points, and establish a motion planning path for the manipulator to avoid space obstacles;
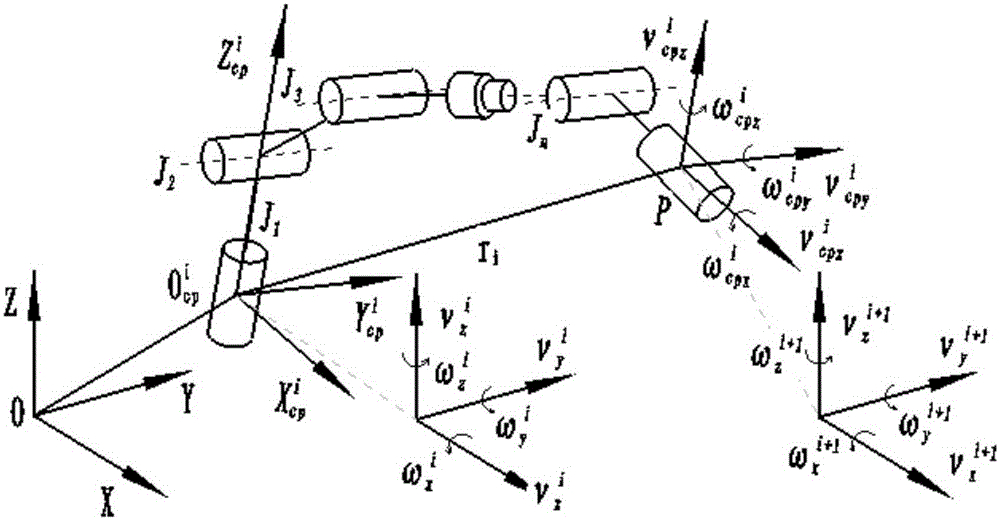
[0034] Step 3: Establish the motion velocity direction and size of the first trajectory interpolation point, use the velocity distribution method of the configuration plane to solve the velocity of each configuration plane ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More