

A follow-up mobile glass cleaning robot based on negative pressure adsorption
A cleaning robot and robot technology, applied in cleaning equipment, window cleaning, household appliances, etc., can solve problems such as low efficiency and permanent magnets that cannot be removed, and achieve high work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention is described in more detail below in conjunction with accompanying drawing example:
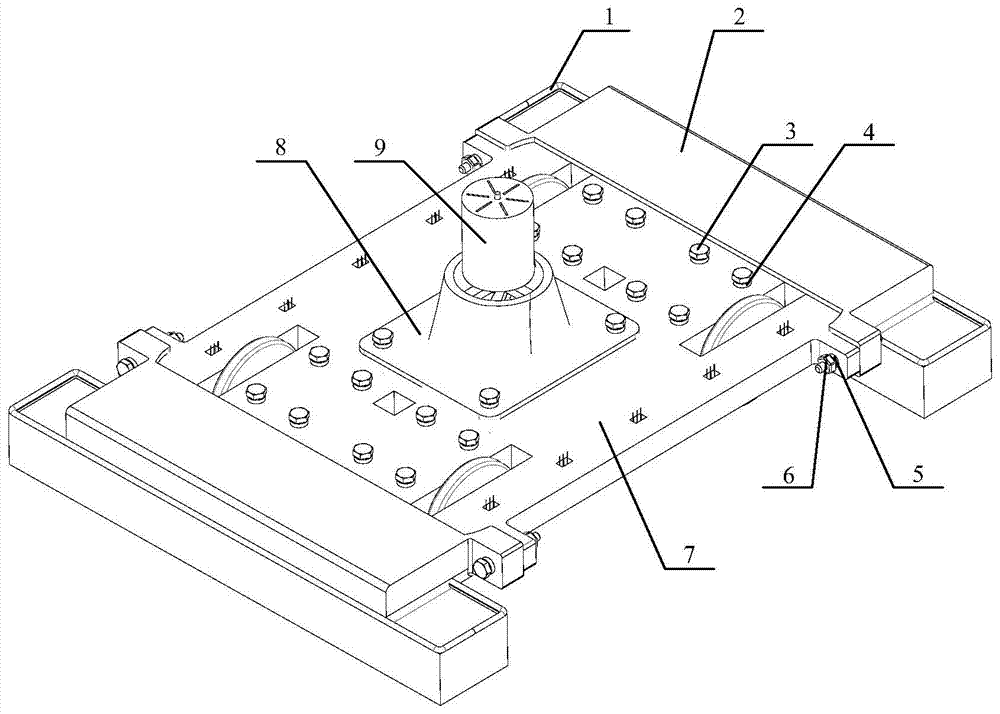
[0022] to combine Figure 1-7 , as shown in Figure 6: It is the working state of following the mobile glass cleaning robot, where E is the cleaning guide, F is the glass to be cleaned, and G is the glass cleaning robot. During the working process, the glass cleaning robot G moves on the glass F under the guidance of the cleaning guide body E, and then cleans the glass. However, the cleaning guide body E can also clean the inside of the glass while guiding the glass cleaning robot G to clean the glass.
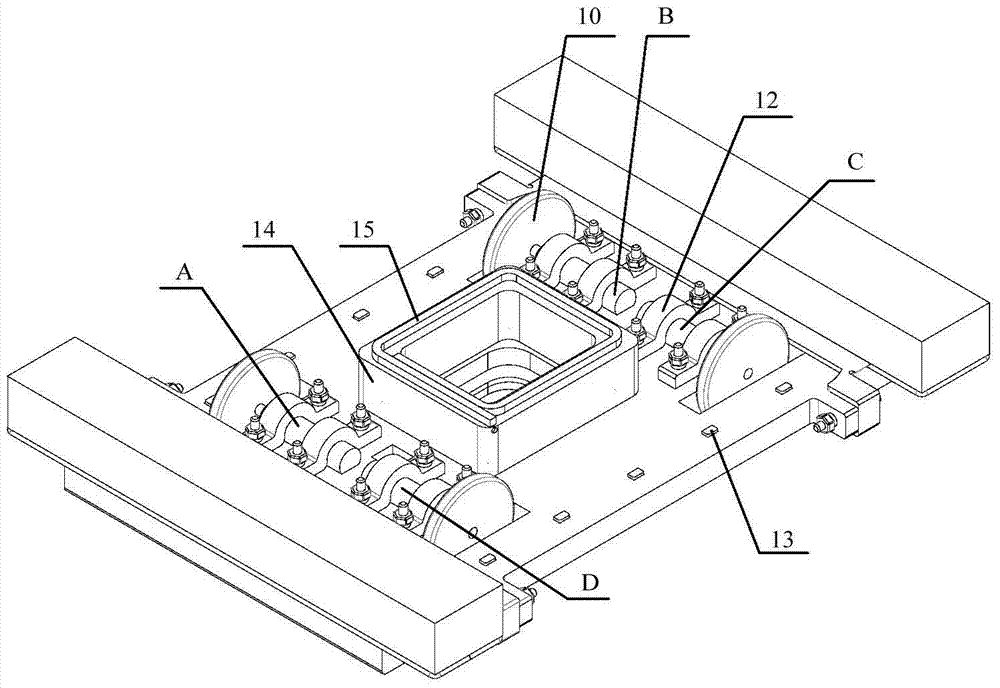
[0023] Such as figure 1 and figure 2 As shown, the glass cleaning robot consists of a cleaning body 1, a cleaning body support carrier 2, a connecting bolt 3, a gasket 4, a spring washer 5, a nut 6, a robot support body 7, a turbo fan 8, a DC motor 9, and a robot moving wheel 10 , DC servo motor A, DC servo motor B, DC servo motor C, DC servo motor D, motor fa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More