

Leg structure of legged robot
A legged robot and leg technology, applied in the field of leg structure of legged robot, can solve the problems of low efficiency, slow movement, cumbersome footed robot, etc., and achieve the effects of simplified control, light structure and high movement speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings.
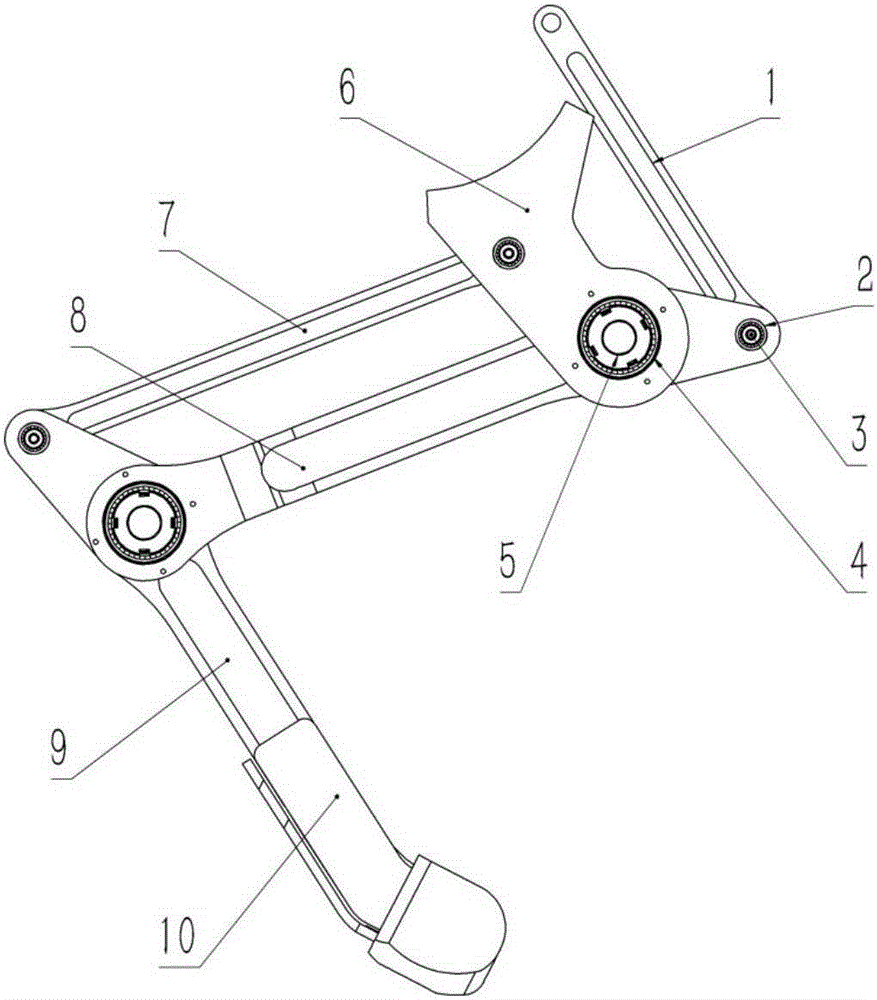
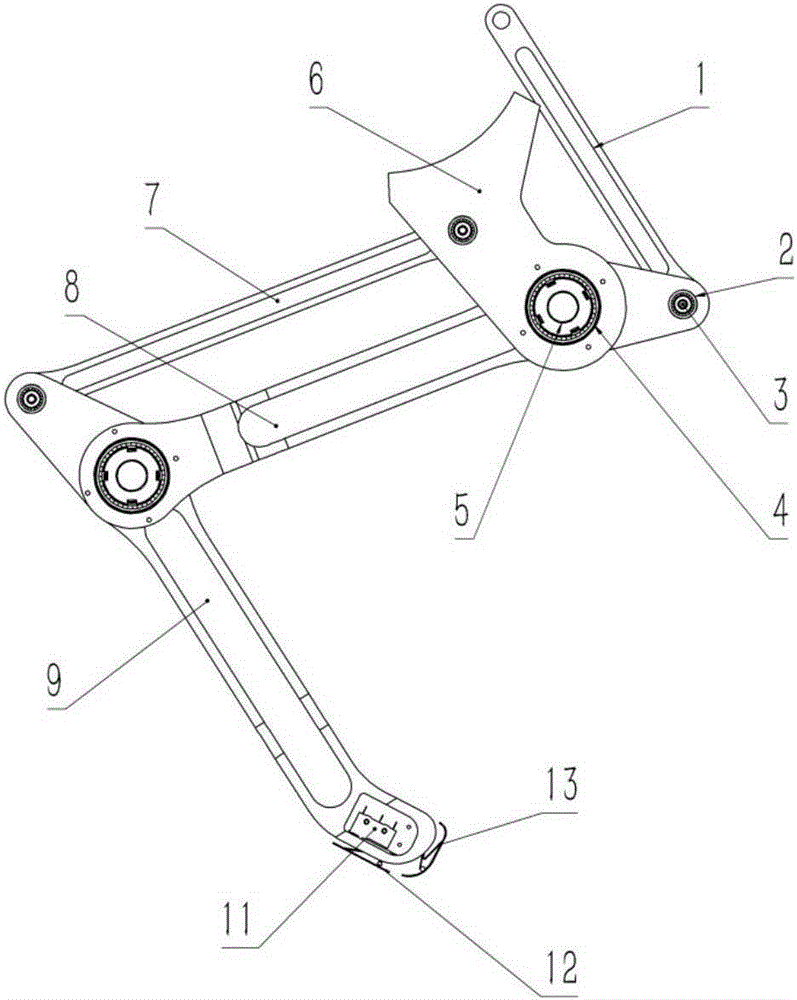
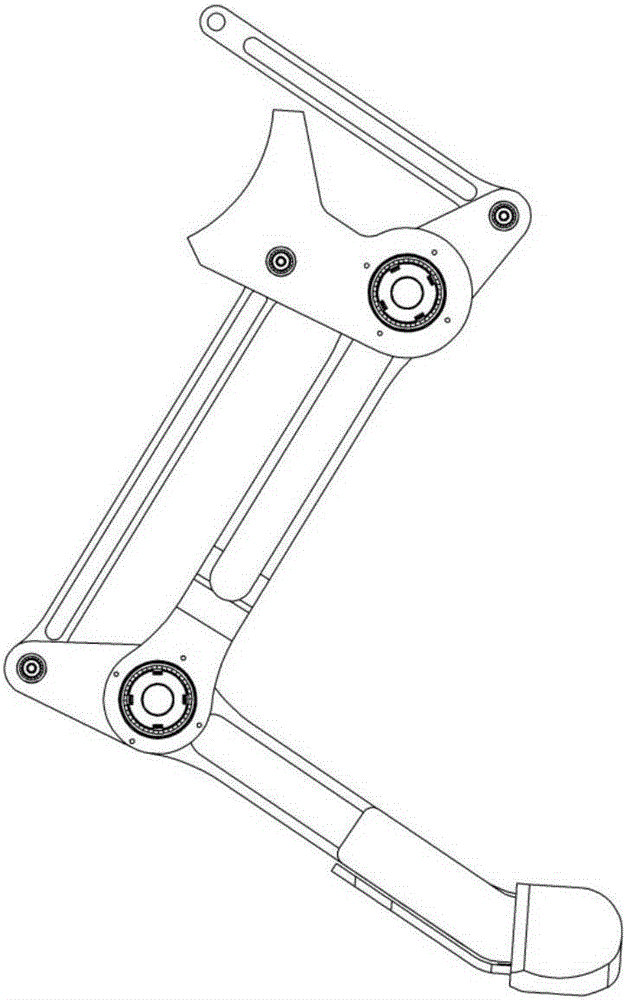
[0024] as attached figure 1 , attached image 3 As shown, the leg structure of the legged robot of the present invention includes a support mechanism and a pull rod mechanism, and the support mechanism includes an upper leg support 6, a middle leg support 8, a lower leg support 9 and connecting parts for forming joints. The pull rod mechanism includes an upper pull rod 1, a lower pull rod 7, a pull rod bearing 2, and a pull rod shaft 3. The support mechanism is used to support the weight of the entire robot and generate thrust; the pull rod mechanism is used to adjust the angle of the support mechanism and stabilize the entire robot.
[0025] The lower leg support 9 and the middle leg support 8 are rotationally connected to the support shaft 5 through the support bearing 4 to form an ankle joint; the middle leg support 8 and the upper leg support 6 are connected to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More