

Survey, search and rescue robot with functions of simultaneous localization and map building
A technology of map creation and robotics, applied in the field of robotics, can solve problems such as delayed rescue timing, complexity, and instability, and achieve the effect of reducing casualties and labor losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
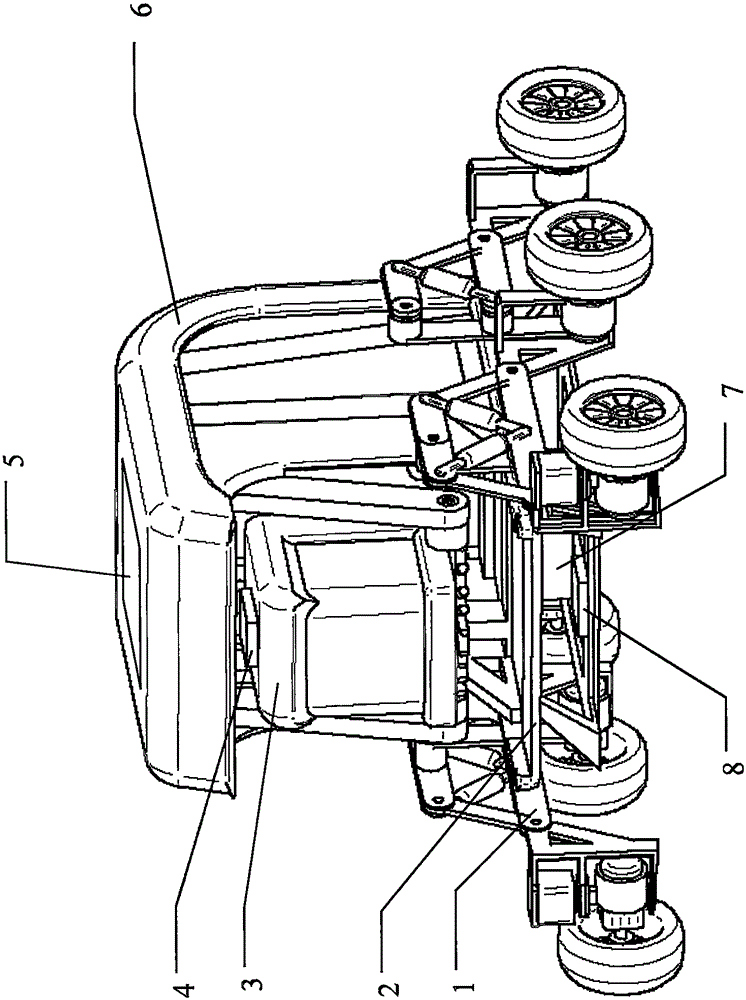
[0022] The real-time positioning and map creation survey search and rescue robot of the present invention, its preferred specific implementation is as follows Figure 1 to Figure 4 Shown:
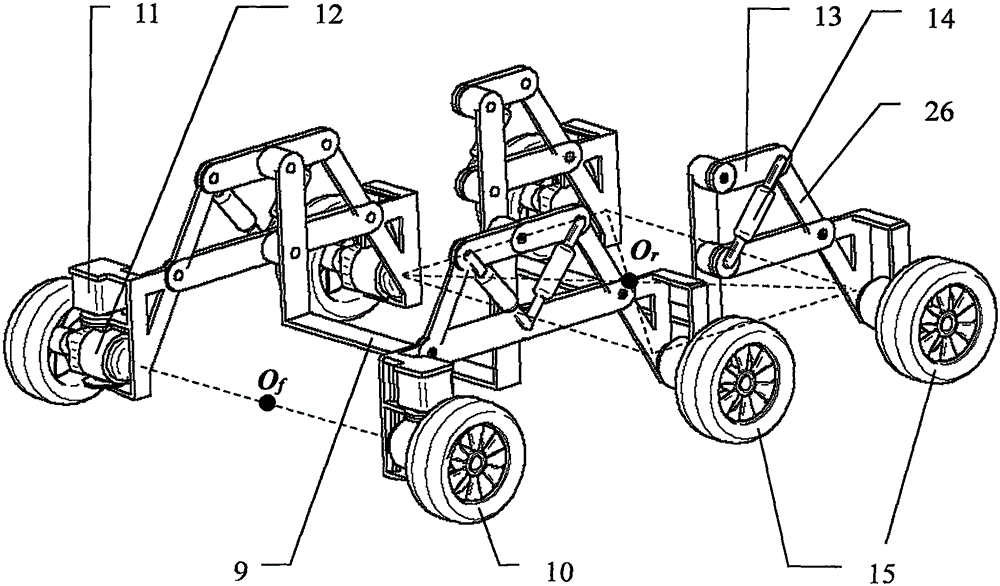
[0023] Such as figure 1 As shown, the real-time positioning and map creation survey search and rescue robot of the present invention includes an obstacle-crossing chassis 1 , a body platform 2 , a three-dimensional scanning module 3 , a main control unit 5 , a body shell 6 and a drive module 7 . Such as figure 1 with figure 2 As shown, the main mechanism and sensors are mounted on the main frame 9 of the obstacle-crossing chassis 1 , including a vehicle body platform 2 , a drive module 7 , a vehicle body inertial sensor 8 and a three-dimensional scanning module 3 . A three-dimensional scanning module 3 and a body shell 6 are installed on the body platform 2, and the body shell 6 is supported by a rigid support to prevent deformation or damage. Real-time positioning and map creation The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More