

Method for solving UAV multitask reconnaissance decision-making problem through cuckoo search algorithm
A cuckoo search and multi-task technology, applied in computing, data processing applications, forecasting, etc., can solve the problem of not considering the income of UAV reconnaissance information, limited working time and load capacity, and difficult complete information reconnaissance missions in all mission areas, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
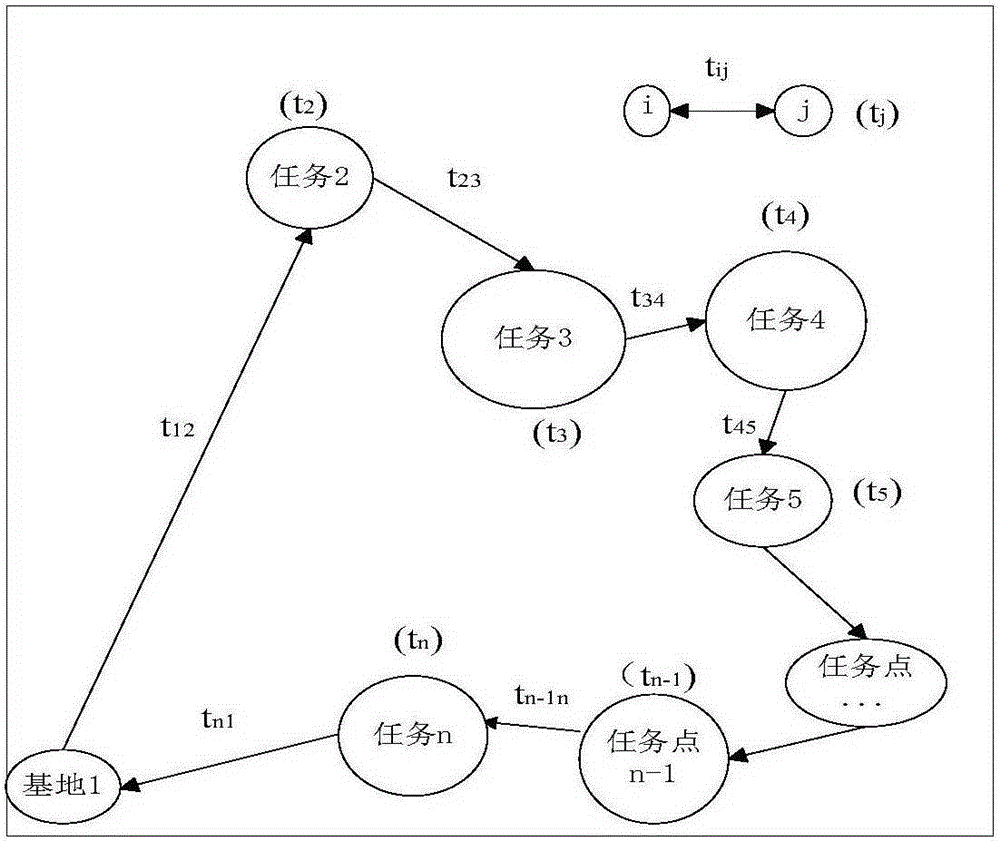
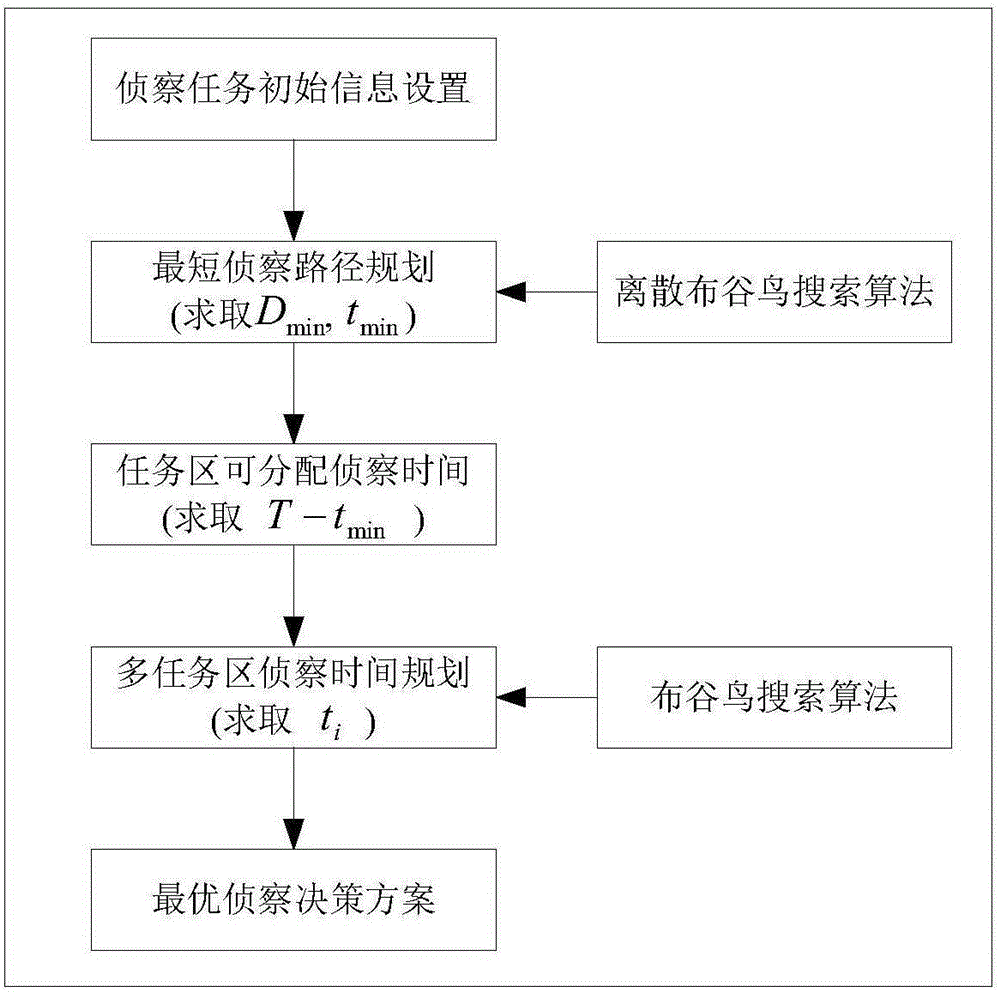
[0043] The present invention divides the entire mission process into two stages. First, the Discrete Cuckoo Search Algorithm (DCSA) is used to solve the optimal planning problem of the reconnaissance path, so that the path for traversing all the reconnaissance mission areas is the shortest, and then the corresponding reconnaissance information is established to determine According to the mission time constraints of the UAV and the minimum reconnaissance certainty constraints of each mission area, while ensuring that all mission areas of reconnaissance are traversed, the basic cuckoo search algorithm (CuckooSearch Algorithm, CSA) is used for each task area to be reconnaissance Allocate the optimal reconnaissance time, so as to maximize the information gain of the whole reconnaissance mission process. Specifically include the following steps:
[0044] Step 1: Input known data;
[0045] The number of reconnaissance mission areas, the location of each mission area, and the area o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More