

Method and device for detecting lane line
A lane line detection and lane line technology, which is applied in the field of image processing, can solve the problems of reducing the accuracy of straight lane detection and increasing the calculation amount of straight lane detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
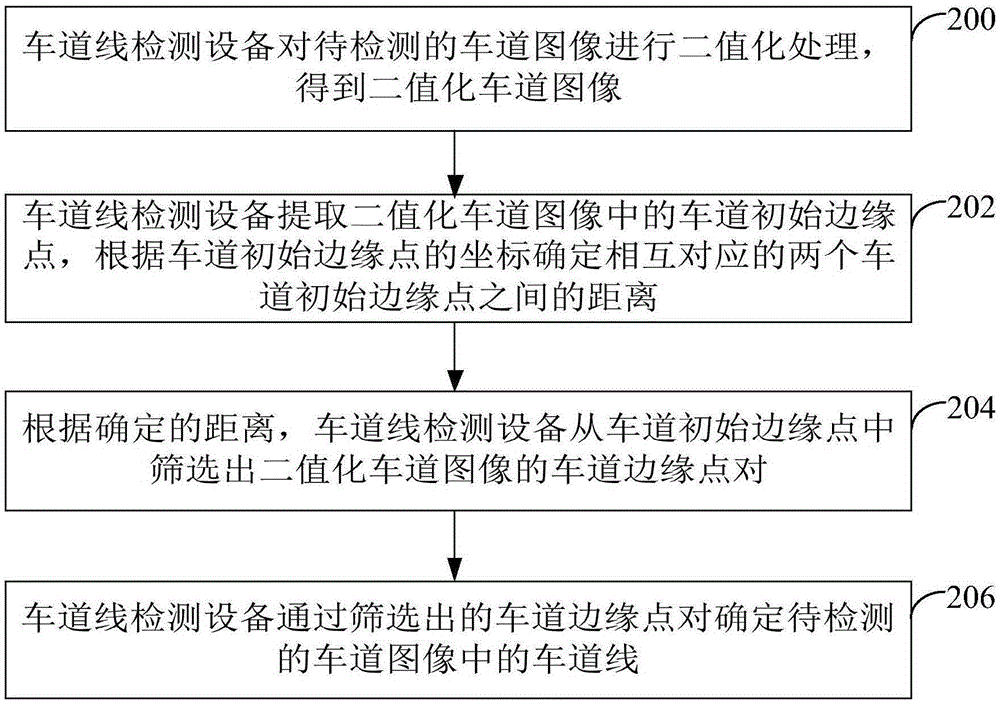
[0074] see figure 2 , the present embodiment provides a lane line detection method, the method includes the following steps:
[0075] Step 200, the lane line detection device performs binarization processing on the lane image to be detected to obtain a binarized lane image.
[0076] When the vehicle starts to drive, the lane line detection equipment starts up and starts to detect the lane lines. The lane line detection equipment obtains the lane image of the current frame captured by the camera or video recorder pre-installed on the vehicle while the vehicle is running, to obtain The detected lane image of the current frame is used as the detected lane image; and then the lane image to be detected is binarized to obtain a binarized lane image.
[0077] The lane line detection equipment can be installed on the vehicle alone, or it can be integrated with a driving recorder or a car navigator to detect the lane lines of the driving vehicle.
[0078] The lane image is the image...
Embodiment 2
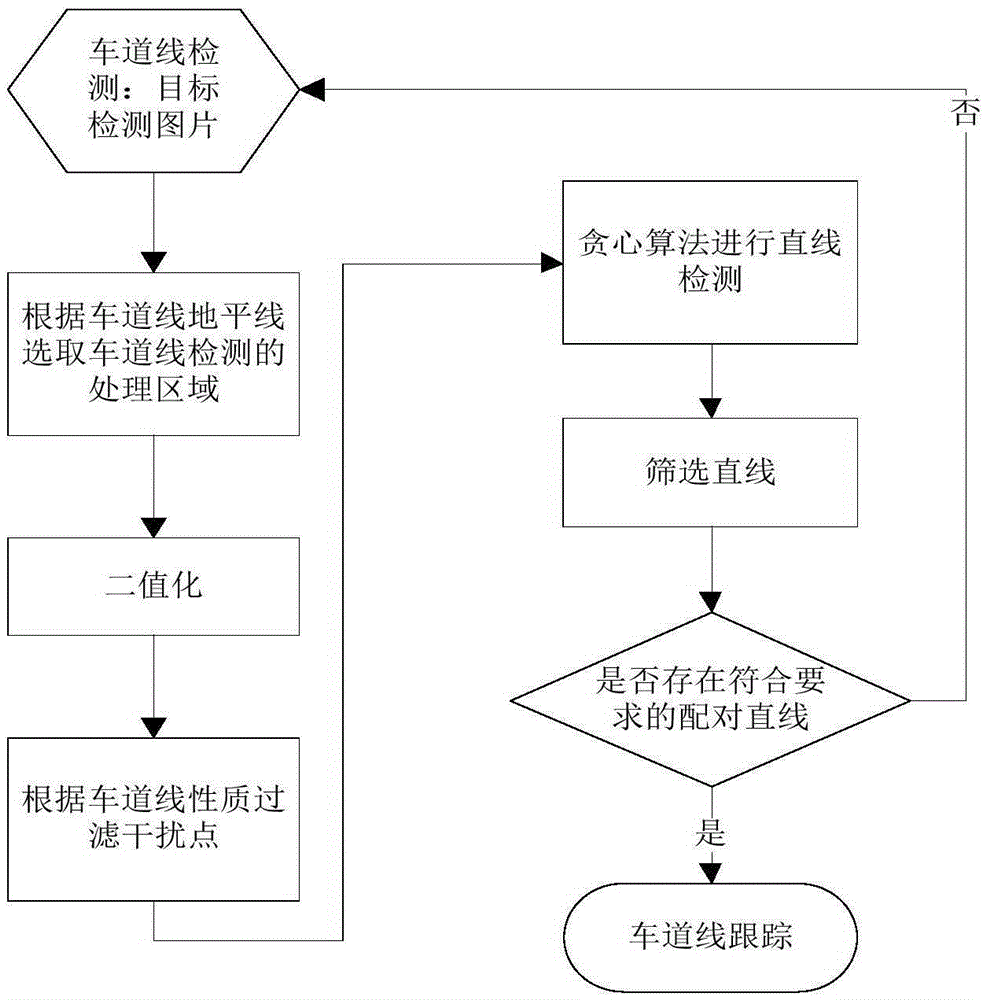
[0168] The technical solution relates to a lane detection method. The lane detection algorithm provided in this embodiment is mainly divided into two steps: 1) lane detection; 2) lane tracking. Specific steps are as follows:
[0169] 1. Lane detection
[0170] see image 3 , the lane line detection proposed in this embodiment is mainly divided into five steps: selecting a target processing area; binarization; filtering interference points; straight line detection and screening of straight lines. The five steps are described below:
[0171] 1) Target treatment area
[0172] It is mainly determined based on the image horizon, and the area below the horizon is selected as the target processing area (the horizon is the disappearing line, the horizon can be determined after the camera is installed and fixed, and the area above the horizon is invalid, so the area below the horizon is selected as the lane line target processing area).
[0173] 2) Binarization
[0174] Use the so...
Embodiment 3
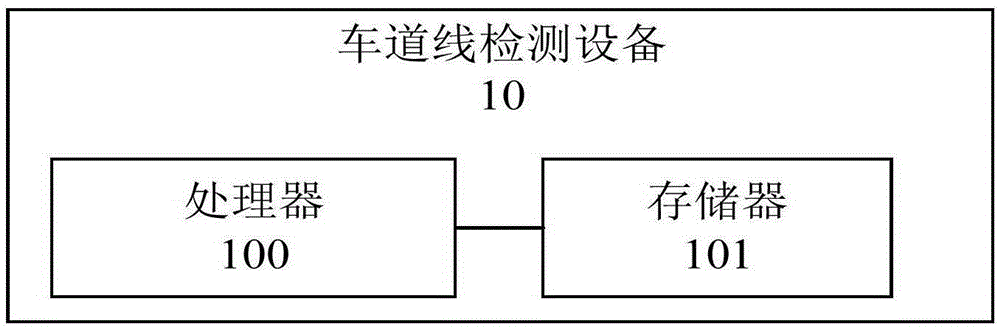
[0208] see Figure 5 , this embodiment provides a lane line detection device for performing the lane line detection method described in the above embodiment, the device includes: a binarization processing module 500, a lane initial edge point extraction module 502, a lane edge point pair determination Module 504 and lane line detection module 506;
[0209] The binarization processing module 500 is used to perform binarization processing on the lane image to be detected to obtain a binarized lane image;
[0210] The lane initial edge point extraction module 502 is connected with the binarization processing module 500, and is used to extract the lane initial edge point in the binarized lane image, and determines two lane line initial edge points corresponding to each other according to the coordinates of the lane initial edge point the distance between;
[0211] The lane edge point pair determination module 504 is connected with the lane initial edge point extraction module 50...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More