Four-degree-of-freedom series-parallel flight simulator motion platform capable of realizing 360-degree rolling movement
A technology of motion platform and degree of freedom, which is applied in simulators, simulation devices of space navigation conditions, transportation and packaging, etc., can solve problems such as difficult to realize large-inclination rolling motion, and achieve simple structure, easy control, and number of branch chains. little effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
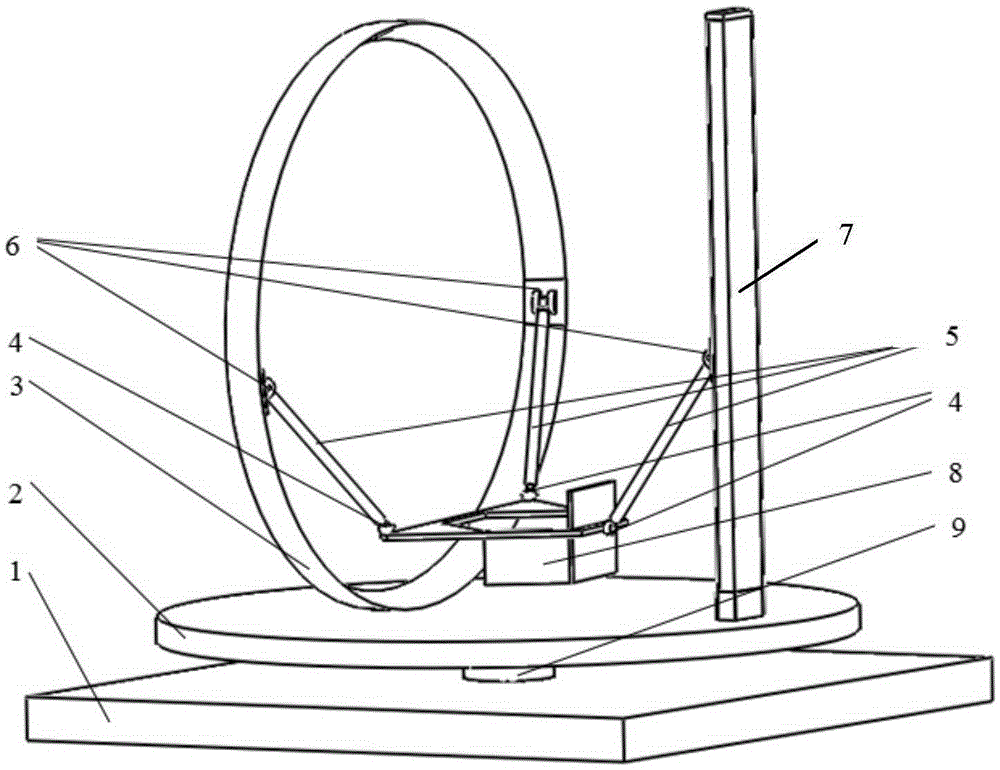
[0012] Such as figure 1 As shown, the four-degree-of-freedom hybrid flight simulator motion platform that can realize 360-degree rolling motion provided by this embodiment includes a base 1, a connecting piece 9, a rotating platform 2, a circular guide rail 3, a vertical guide rail 7, and three sliders 6. Three connecting rods 5, three spherical pairs 4 and a moving platform 8; the base 1 is set horizontally; the lower end of the connecting piece 9 is fixedly connected to the center of the surface of the base 1; the center of the bottom surface of the rotating platform 2 and the upper end of the connecting piece 9 pass through The active rotary pair is connected; the ring guide rail 3 and the vertical guide rail 7 are vertically fixed on the surface of the rotating platform 2 at a distance, and the vertical guide rail 7 is aligned with the vertical bisector of the ring guide rail 3; the two sliders 6 are respectively moved by a The pair is connected with the inner circumferent...
Embodiment 2
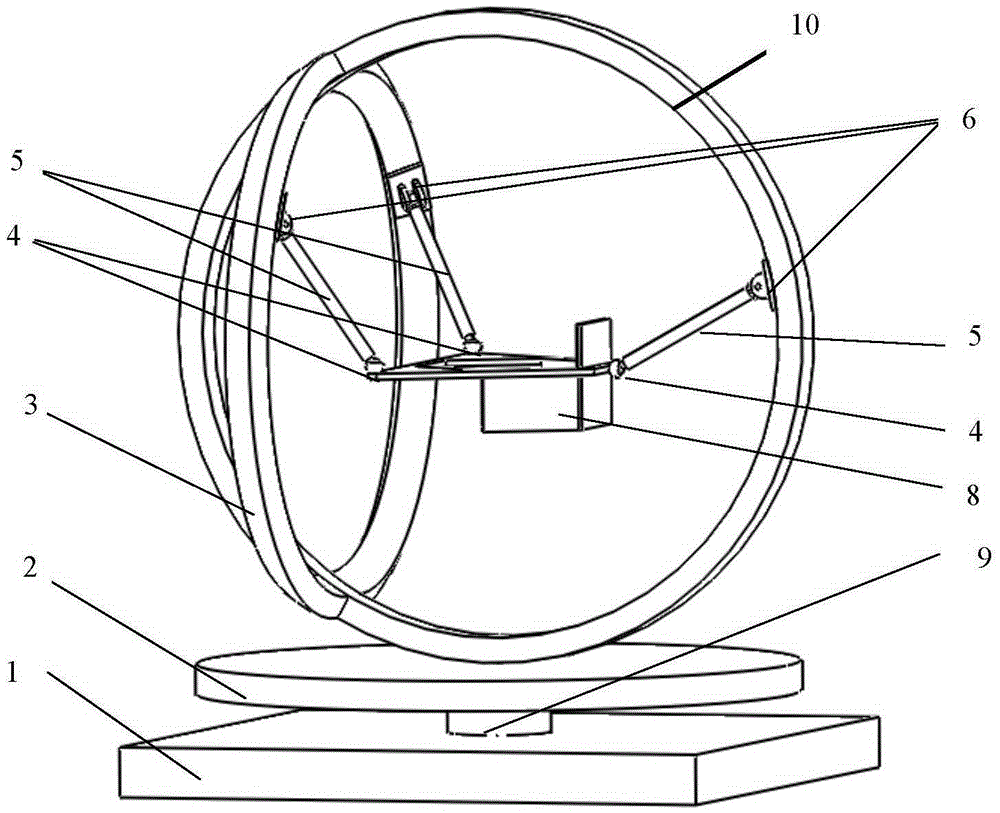
[0015] Such as figure 1 As shown, the four-degree-of-freedom hybrid flight simulator motion platform that can realize 360-degree rolling motion provided by this embodiment is different from the flight simulator motion platform provided by Embodiment 1 in that the first vertically arranged on the surface of the rotating platform 2 is used. Two annular guide rails 10 replace vertical guide rail 7, and the setting direction of second annular guide rail 10 and annular guide rail 3 is perpendicular, and second annular guide rail 10 is connected with annular guide rail 3 simultaneously, all the other structures are identical.
[0016] When the four-degree-of-freedom hybrid flight simulator motion platform that can realize 360-degree rolling motion provided by the present invention is in use, the pilot first sits on the moving platform 8 and fixes it. The way the guide rail 7 or the second circular guide rail 10 moves enables the moving platform 5 to realize 360-degree rolling motion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More