

A Control Method for Space Robots Independent of Model Parameters
A space robot and control method technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the technical difficulties of distributed control scheme design, the difficulty of accurate measurement of joint angular velocity, and the difficulty of measuring angular velocity, etc., to achieve Strong practicability and versatility, enhanced versatility, and improved control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The working process and working principle of the present invention will be further explained below in conjunction with the accompanying drawings.
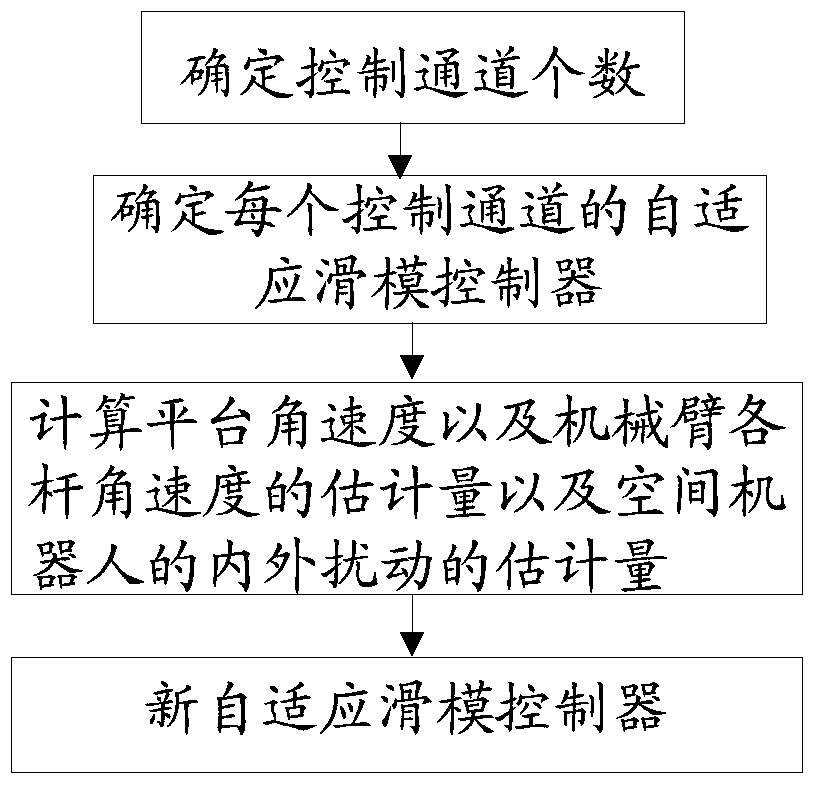
[0045] Such as figure 1 As shown, a kind of space robot control method that does not depend on model parameter of the present invention comprises the following steps:
[0046] (1) Determine the number of control channels according to the number of degrees of freedom of the space robot, and the number of control channels is the same as the number of degrees of freedom;
[0047] (2) According to the platform attitude angle and angular velocity of the space robot and the joint angle and joint angular velocity of each arm bar of the mechanical arm, determine the adaptive sliding mode controller of each control channel in step (1);
[0048] (3) According to the high-order state observer of the space robot, the angular velocity of the platform, the angular velocity of each arm of the manipulator, and the estimated quantity of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More