

Air bag type flexible finger and flexible hand
An airbag type, dexterous hand technology, applied in the field of manipulators, can solve problems such as insufficient flexibility, complex control system, poor adaptability, etc., and achieve the effect of solving poor adaptability, wide applicability, and increasing the number of
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
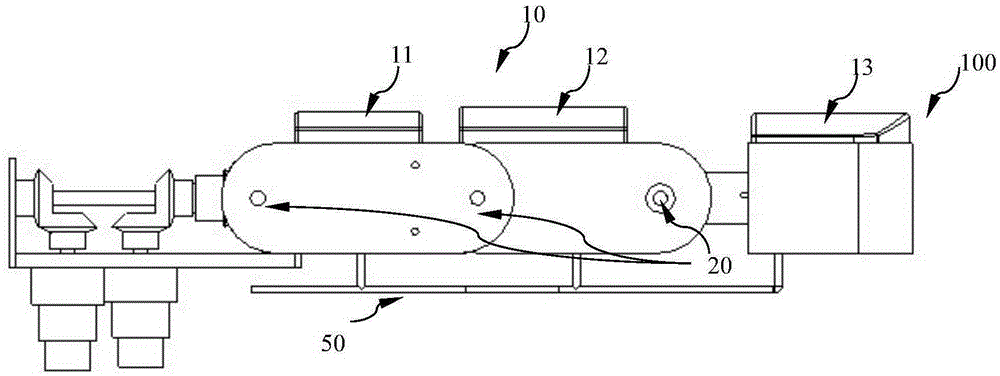
[0030] figure 1 It is a schematic diagram of the composition of the air bag dexterous finger of the present embodiment
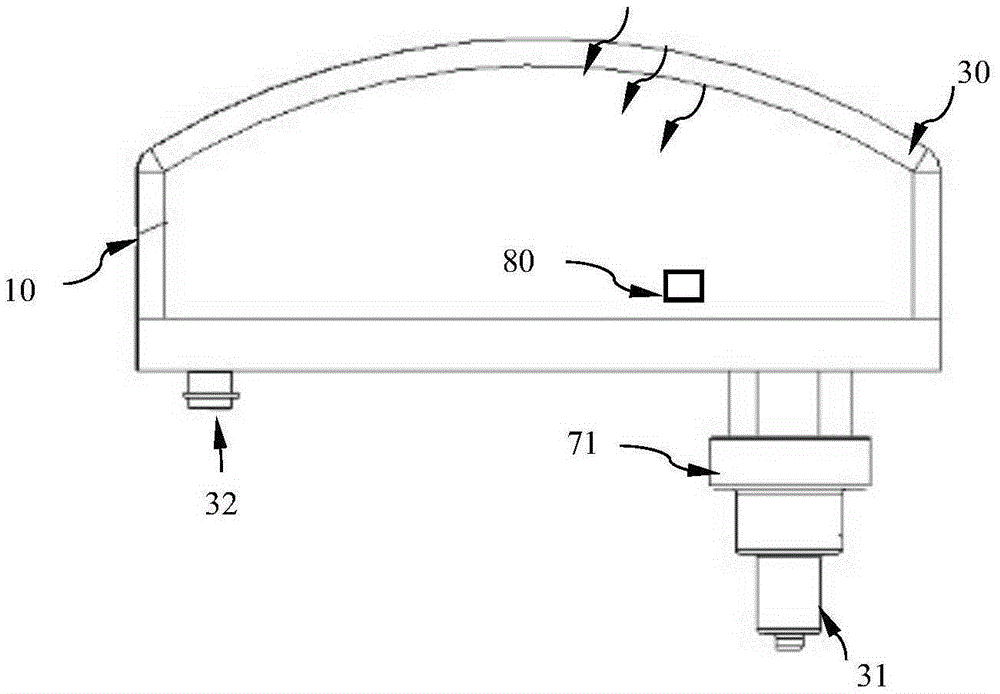
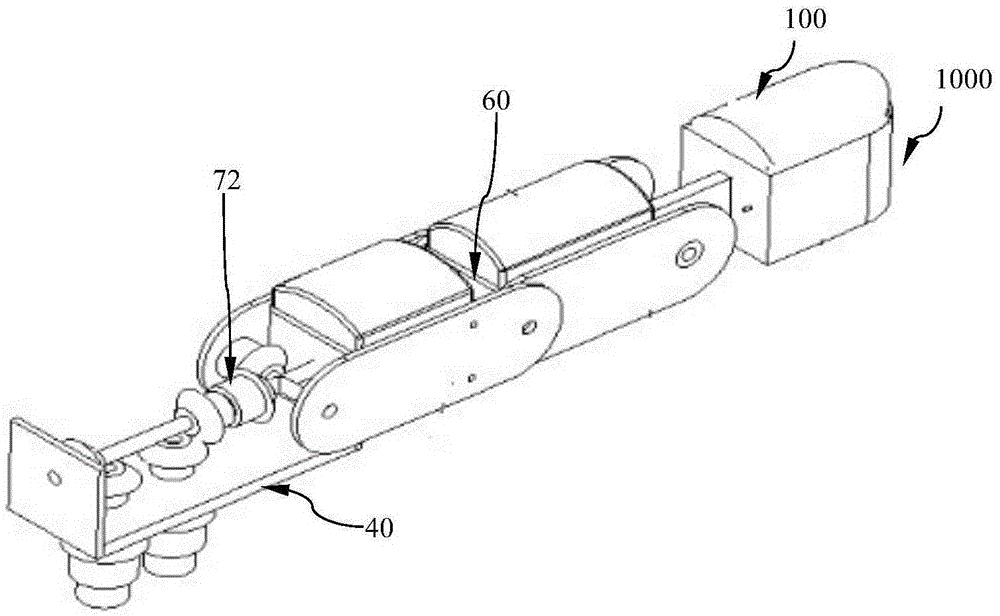
[0031] The airbag-type dexterous finger 100 of this embodiment includes three finger joints 10, a drive motor 20 arranged at the junction of two adjacent finger joints 10, and an airbag 30 adhered to the inner side of the finger joints 10; wherein
[0032] Three finger joints 10 comprise proximal knuckles 11, middle knuckles 12, and far knuckles 13. figure 1 The shown ones are flexibly connected by hinges, and the shaft at the joint is connected with the drive motor 20, and the forward and reverse rotation of the drive motor 20 drives the flexion and grasping of the finger joints.
[0033] The drive motor 20 is a low-speed control motor that can output a large twist. It is arranged at the joint of two adjacent finger joints 10. It has an interface connected with a controller or a control terminal, and is used to rotate and move according to external signals...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More