Method for calculating azimuth gyro scale under platform inertial navigation dynamic conditions
A dynamic condition and azimuth technology, applied in the field of inertial navigation, can solve the problems affecting the attitude accuracy of inertial navigation and the inability to obtain the azimuth gyro scale, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below with reference to the embodiments of the accompanying drawings.
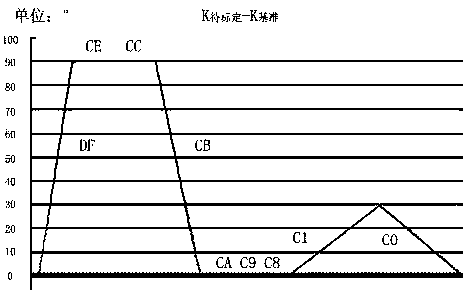
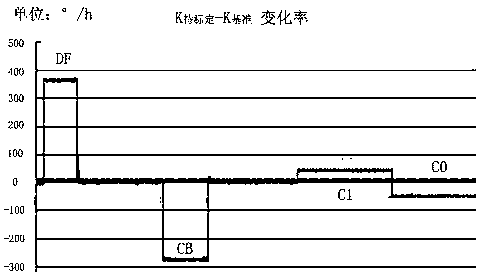
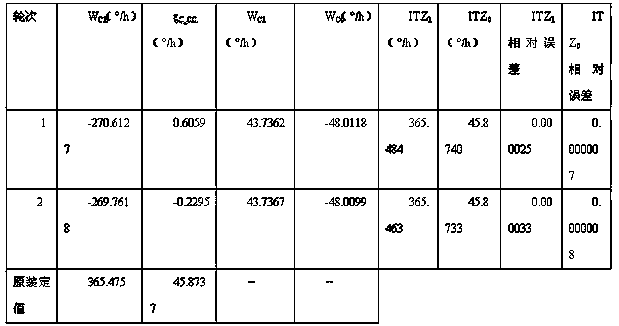
[0020] The invention relates to a method for calculating azimuth gyro scaling based on dynamic conditions of platform inertial navigation. The method includes the following steps: firstly, the reference inertial navigation (marked as inertial navigation A) is in a good working state after startup and calibration, and the inertial navigation to be calibrated (marked as inertial navigation A) Execute the azimuth gyro calibration procedure for Inertial Navigation B); second, two sets of INS synchronously record heading data to obtain the heading change rate of Inertial Navigation B calibration process relative to Inertial Navigation A; the third is to use the relative heading changes of the two sets of INS rate, and obtain the inertial navigation B azimuth gyro scale.
[0021] In order to facilitate the description of the content of the present ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More