

A method for detecting robot precision using projection imaging of solid-liquid phase rapid conversion materials
A rapid conversion and imaging detection technology, applied in the direction of instruments, measuring devices, optical devices, etc., can solve the problems of multiple models, complex access structure, low efficiency, etc., to achieve enhanced test accuracy, high degree of intelligence, and convenient recycling Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
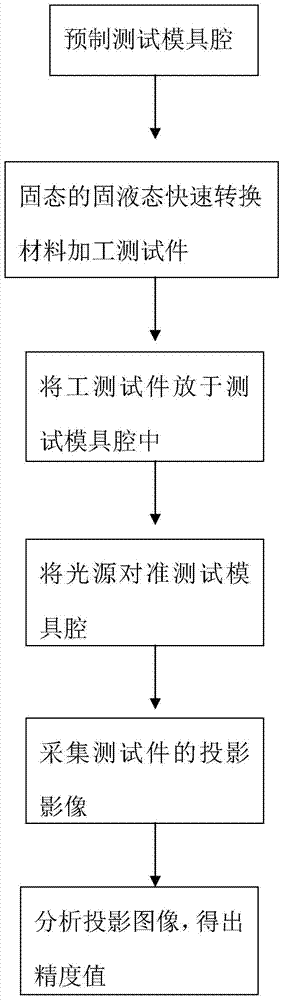
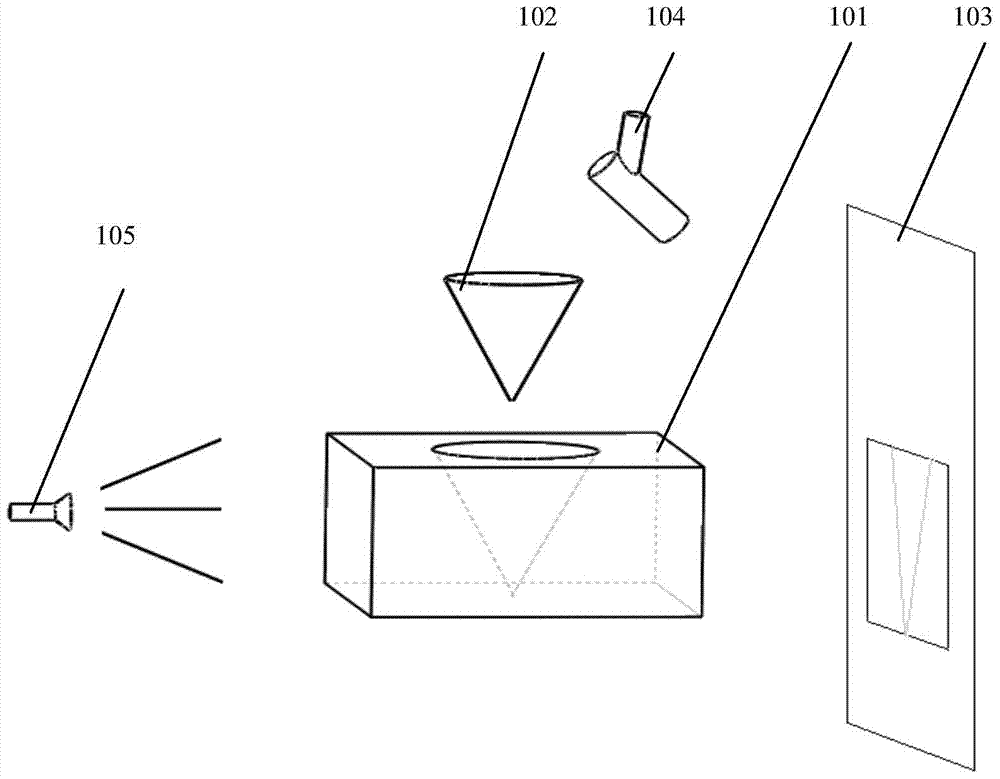
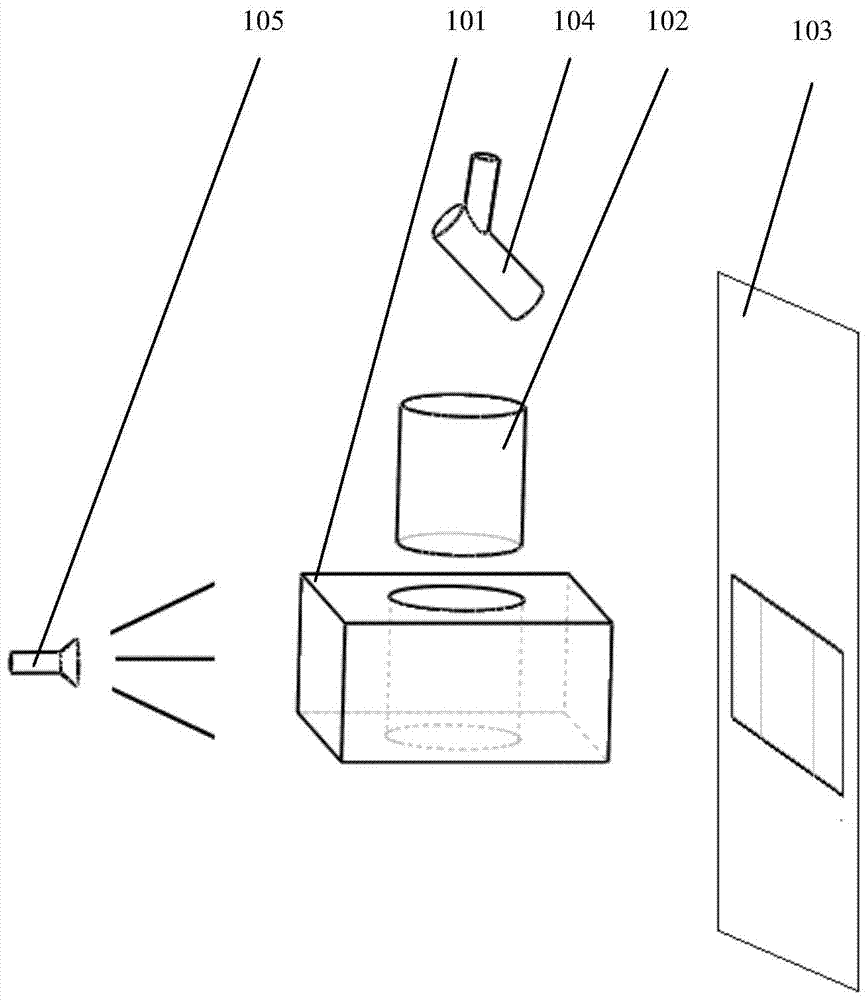
[0030] Such as Figure 1 to Figure 7 Shown: a method for detecting the accuracy of a robot using projection imaging of solid-liquid phase rapid conversion materials, the specific steps are as follows,
[0031] Step 1: Prefabricate a test mold cavity made of transparent glass, and the test mold cavity can be concave conical, circular, square, hexagonal, hemispherical, or in various shapes as required The combination;
[0032] Step 2: Use the tested robot to process ice cubes from -18 degrees Celsius to -4 into cones, cylinders, cuboids, tetrahedrons, cuboids, or hemispherical test pieces. Use dry ice mist to maintain the temperature of the ice c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More