

Instructive six-degree-of-freedom carrying manipulator
A technology of degrees of freedom and manipulators, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of manipulator disassembly, assembly, inconvenient processing, poor man-machine interaction of manipulators, and closed control system, etc., to achieve good results Human-computer interaction, beneficial to mathematical analysis, and the effect of reducing the suspension weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
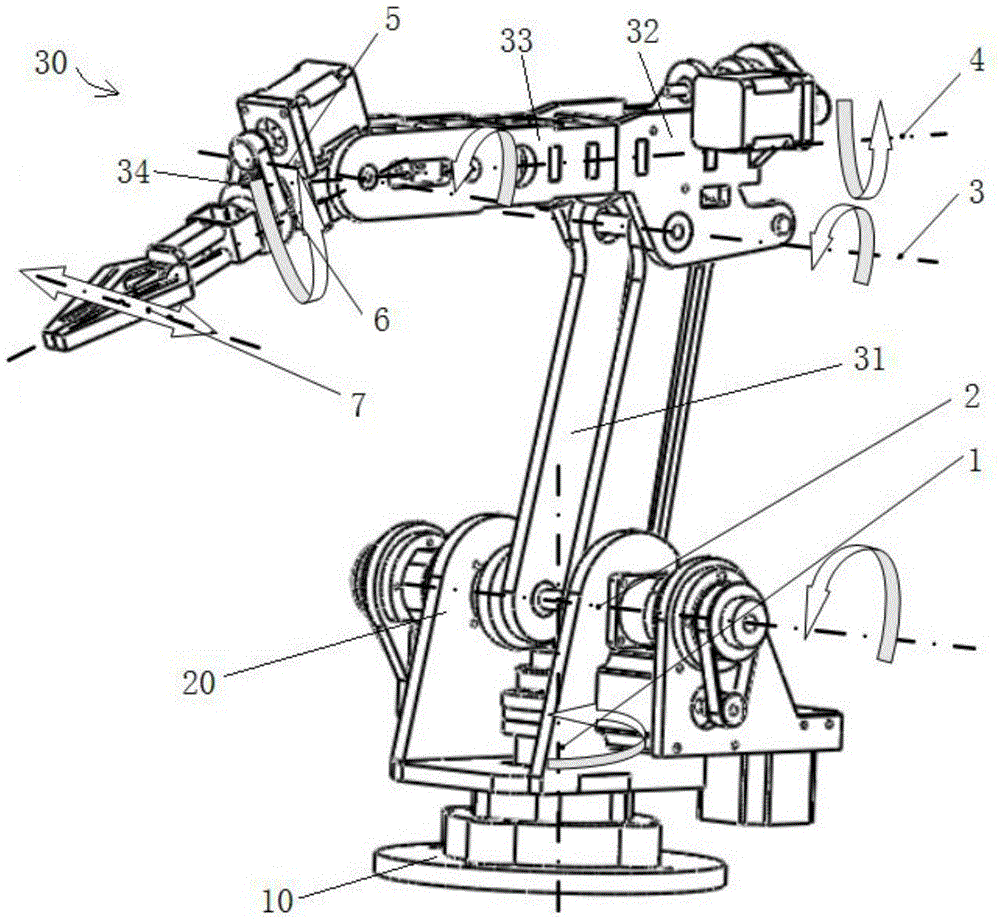
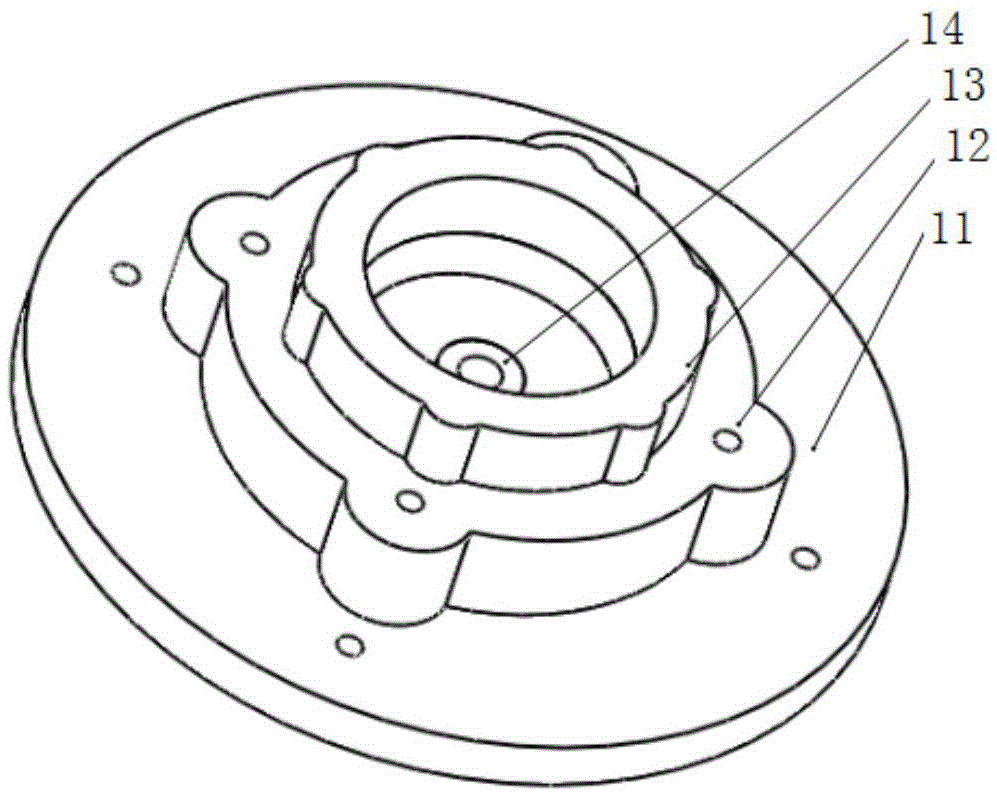
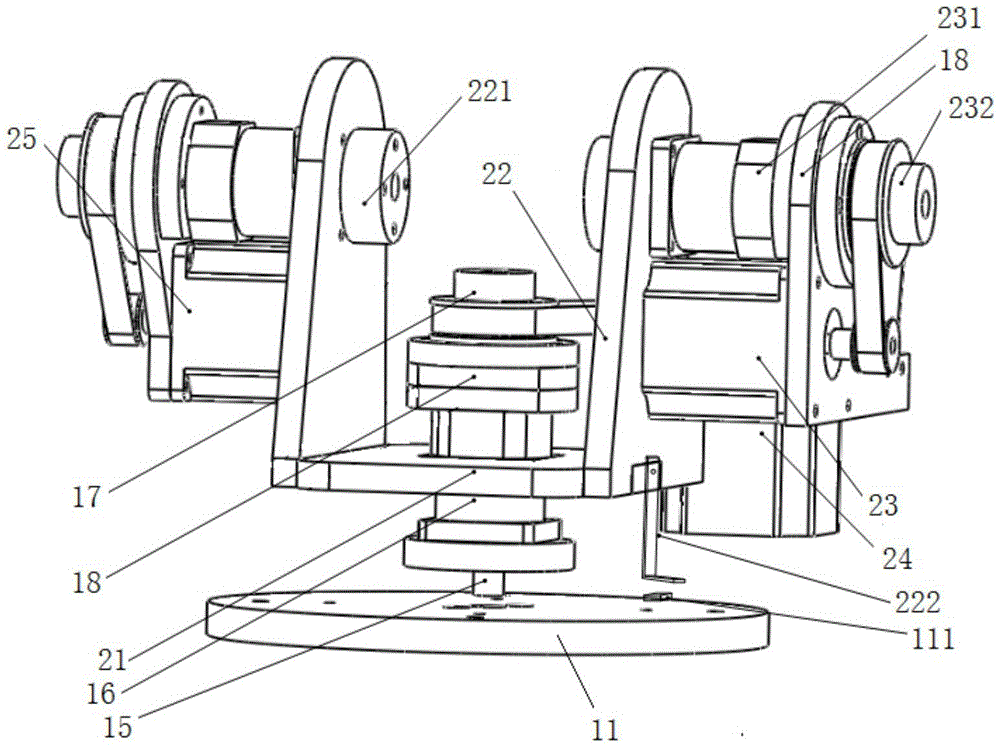
[0044] Such as figure 1 As shown, a teaching-type six-degree-of-freedom handling manipulator includes a support base 10, a waist 20, a manipulator upper limb 30 and a control system.
[0045] The upper limb 30 of the mechanical arm includes a large arm 31 , an elbow joint 32 , a small arm 33 , a wrist 34 and a mechanical claw 7 which are movable in sequence.
[0046] Waist 20 and mechanical arm upper limb 30 have such as figure 1 The six movable joints shown are: waist rotation joint 1, upper arm lifting joint 2, forearm lifting joint 3, forearm rotation joint 4, wrist lifting joint 5 and wrist longitudinal rotation joint 6.
[0047] Such as figure 1 As shown, the rotation axes of the forearm rotation joint 4 , the wrist lifting joint 5 and the wrist longitudinal rotation joint 6 intersect at a common point.
[0048] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More