

Wave variable four-channel bilateral control method based on master-end force buffer
A control method and four-channel technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of control lag at the slave end, affecting system transparency and tracking, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0162] Step 1: Establish a dynamic model of the bilateral control system under time delay.
[0163] In formula (1)(2), take
[0164] m m =m s =0.5, b m = B s = 0.2.
[0165] The delay of the forward channel and the reverse channel in the task are both 0.5s.
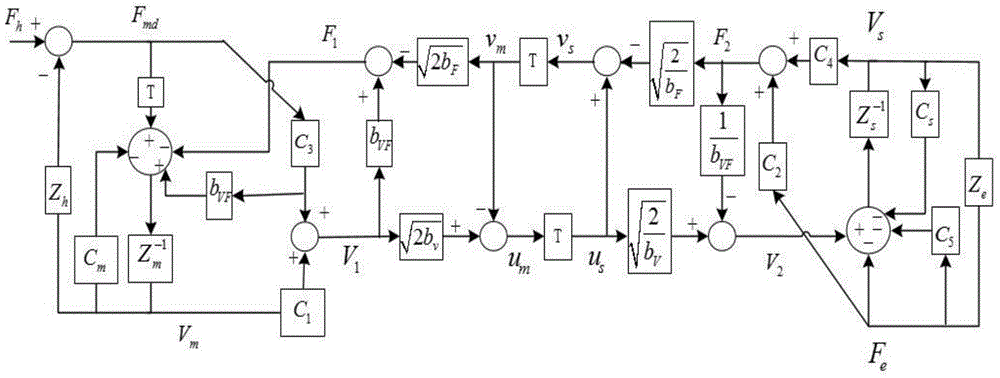
[0166] Step 2: Design the master controller
[0167] The parameters of the control system are as follows:
[0168] Z m =Z s =0.5s, C m =0.2+0.2 / s, C s =0.2+0.2 / s.
[0169] C 1 =Z s +C s , C 2 =0.1, C 3 =0.5, C 4 =-(Z m +C m ), C 5 = 0.2.
[0170] Z h =0.5s+1+0.2 / s, Z e =0.5 / s.
[0171] b VF = 1, b V =0.1, b F = 10.
[0172] Combining the above specific data and formula (7), the transfer matrix H of the master-end controller model can be obtained M for
[0173] H M = e - 0.5 s + 0.5 - ( 0.5 s + 0.2 + 0.2 / s ) 0.5 0.5 s + 0.2 + 0.2 / s - - - ( 38 )
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More