

Three-degree-of-freedom and small-inertia bionic leg of an armed robot based on wire transmission
A robot, degree of freedom technology, applied in the field of armed robots, can solve the problems of large rotational inertia, unstable output force, complex structure, etc., and achieve the effect of stable output torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the purpose, content, and advantages of the present invention clearer, the specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
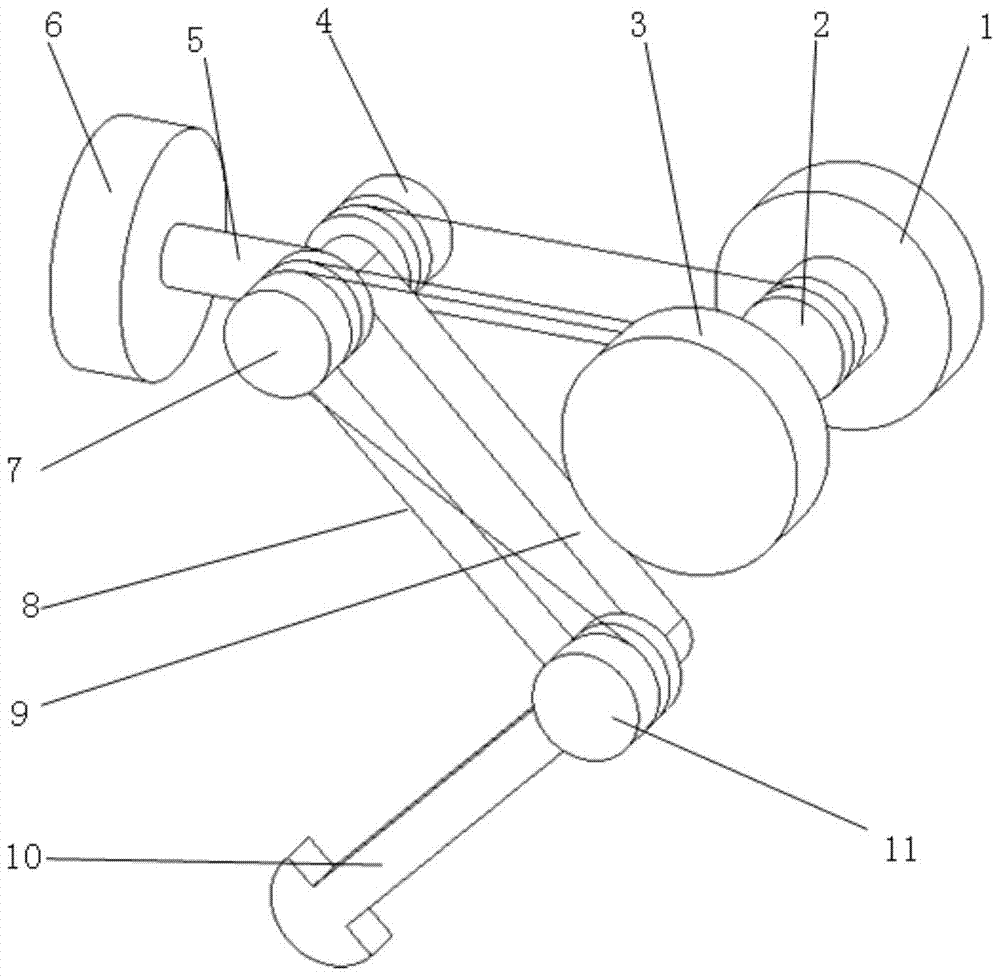
[0022] In order to solve the problems of the prior art, the present invention provides a three-degree-of-freedom small-inertia bionic leg of an armed robot based on wire transmission, such as figure 1 As shown, it includes: hip joint Y-direction driver 1, hip joint Y-direction driving pulley group 2, knee joint driver 3, hip joint Y-direction driven pulley group 4, hip 5, hip joint X-direction driver 6, knee joint guide pulley group 7 , transmission wire 8, thigh 9, calf 10, knee joint driven pulley block 11;
[0023] Wherein, the hip joint X-direction driver 6 is a cylindrical rotary driver, which is connected to the hip 5 through a coupling, the hip 5 is hinged to the thigh 9, and the thigh 9 is hinged to the calf 10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More