A special neck joint structure for a three-degree-of-freedom robot
A joint structure and robot technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve problems such as difficult to achieve robot motion effects, and achieve the effect of compact structure, stable motion, and increased stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
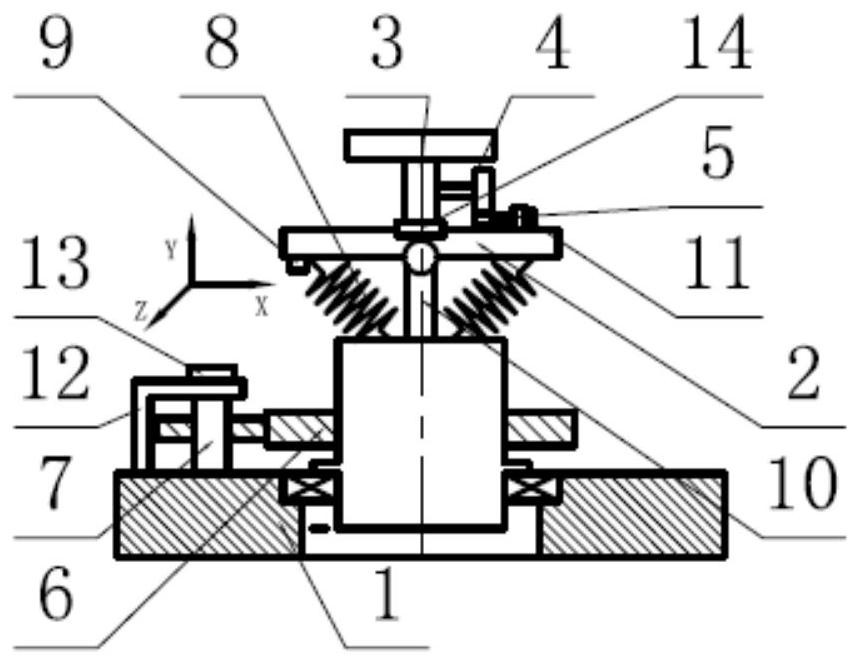
[0014] see figure 1 As shown, a special neck joint structure for a three-degree-of-freedom robot of the present invention includes an outer connector B3 for installing the robot head, an inner connector 2 mounted on the outer connector B3 using a cylindrical hinge 14, The outer connecting piece A1 connected to the robot body, the gear shaft C6 installed on the outer connecting piece A1 that can rotate freely, the gear shaft D7 meshed with the gear shaft C6, and fixedly installed on the outer connecting piece through the motor C frame 12 The motor C13 on A1, the gear shaft B5 and the motor B11 installed on the inner connector 2, and the gear shaft A4 installed on the outer connector B3 and gear shaft B5 for meshing transmission.
[0015] see figure 1 As shown, a tension coil spring 8 is installed between the inner connecting piece 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More