UUV adaptive fuzzy sliding-mode control method under strong disturbance of load arranging
A technology of adaptive fuzzy and control methods, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as UUV damage, large jitter, and unsatisfactory effects, so as to avoid damage and reduce jitter vibration effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0024] Embodiment 1: A UUV adaptive fuzzy sliding mode control method under strong disturbance of load placement includes the following steps:
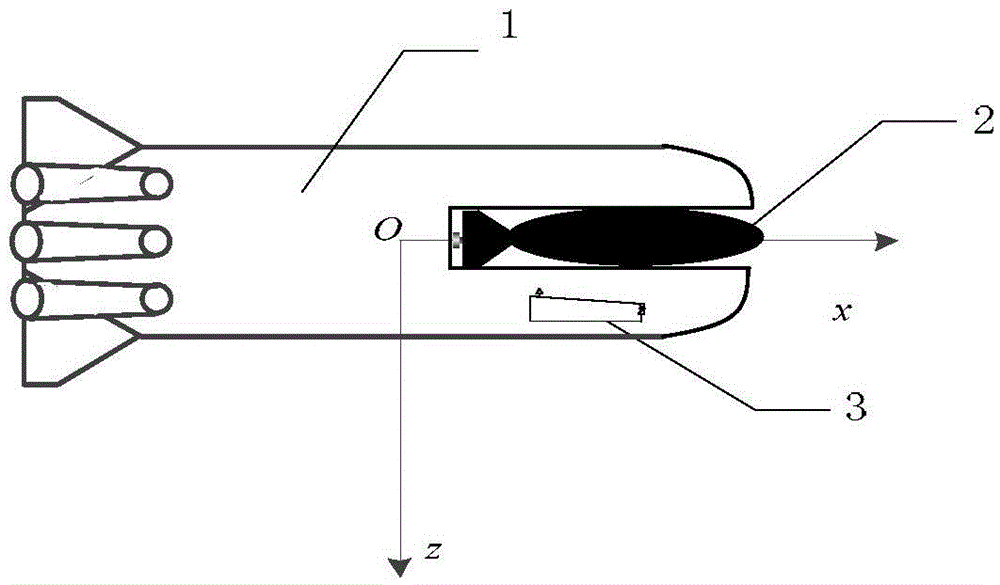
[0025] Step 1: The UUV carries out the load deployment, which produces two kinds of interference to the UUV, one is the interference caused by the movement of the load in the grid-shaped tube, and the other is the interference caused by the water entering the water supply tank;
[0026] Step 2: Obtain the current state μ of the UUV, and construct a dynamic model of the UUV under load deployment disturbance;
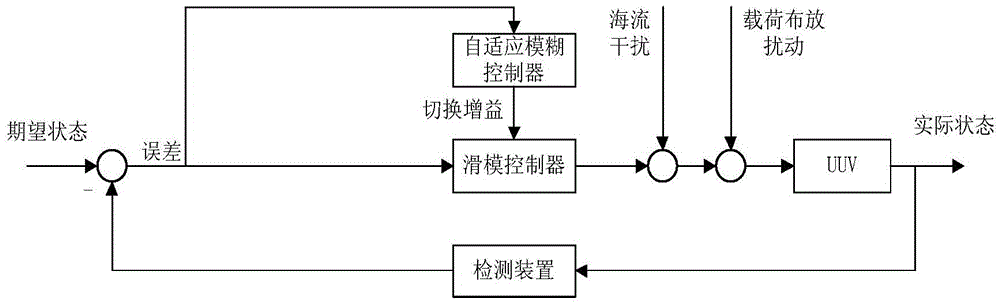
[0027] Step 3: Design the sliding mode surface s according to Step 2, and construct the sliding mode controller;
[0028] Step 4: Design a fuzzy controller based on the sliding mode controller constructed in step 3. The input of the fuzzy controller is the sliding mode surface s, and the output is △K, and the △K is the increment of the switching control law coefficient of the sliding mode controller value;
[0029] Step 5: Use ...
specific Embodiment approach 2
[0033] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the step 1, the UUV carries out load deployment, and two types of interference are generated on the UUV, specifically:
[0034] (1) The movement of the load in the grid-shaped tube causes interference;
[0035] The motion equation of the load in the grid tube is:
[0036] ( m T + λ 11 ) dv T d t = F T - R x - F m - - - ( 1 )
[0037] where the m T is the load mass, v T is the moving speed of the load in the tube, λ 11 is the additional mass of the l...
specific Embodiment approach 3
[0071] Embodiment 3: This embodiment differs from Embodiment 1 or Embodiment 2 in that: the current state μ of the UUV is obtained in the second step, and the dynamic model of the UUV under load deployment disturbance is constructed as follows:
[0072] Obtain the current status of UUV through a series of sensors of UUV itself. Describe the position and attitude vector of UUV in the earth coordinate system, where ξ, η, ζ are the longitudinal, lateral and vertical coordinates in the fixed coordinate system, are the pitch angle, roll angle, and yaw angle;
[0073] The UUV dynamic model is:
[0074] M χ · + C ( χ ) χ + D ( χ ) χ + L ( χ ) + G ( μ ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com