

Soft-bodied robot glove for hand movement function recovery
A technology of hand movement and robotics, applied in passive exercise equipment, physical therapy, etc., can solve the problems of low hand strength of patients, reduce the effect of rehabilitation training, and increase the burden of use, so as to reduce the burden of wearing and improve comfort , the effect of improving the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
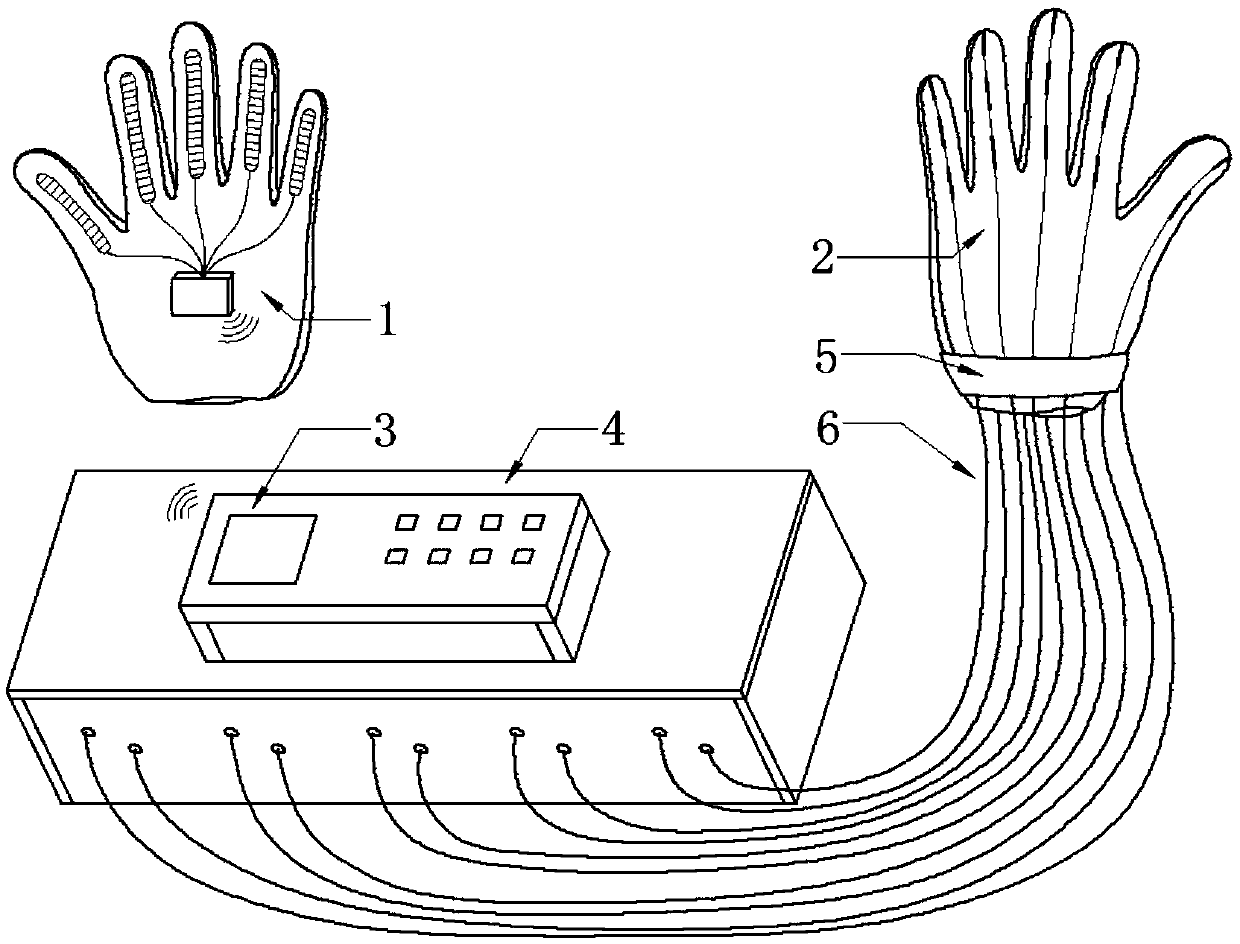
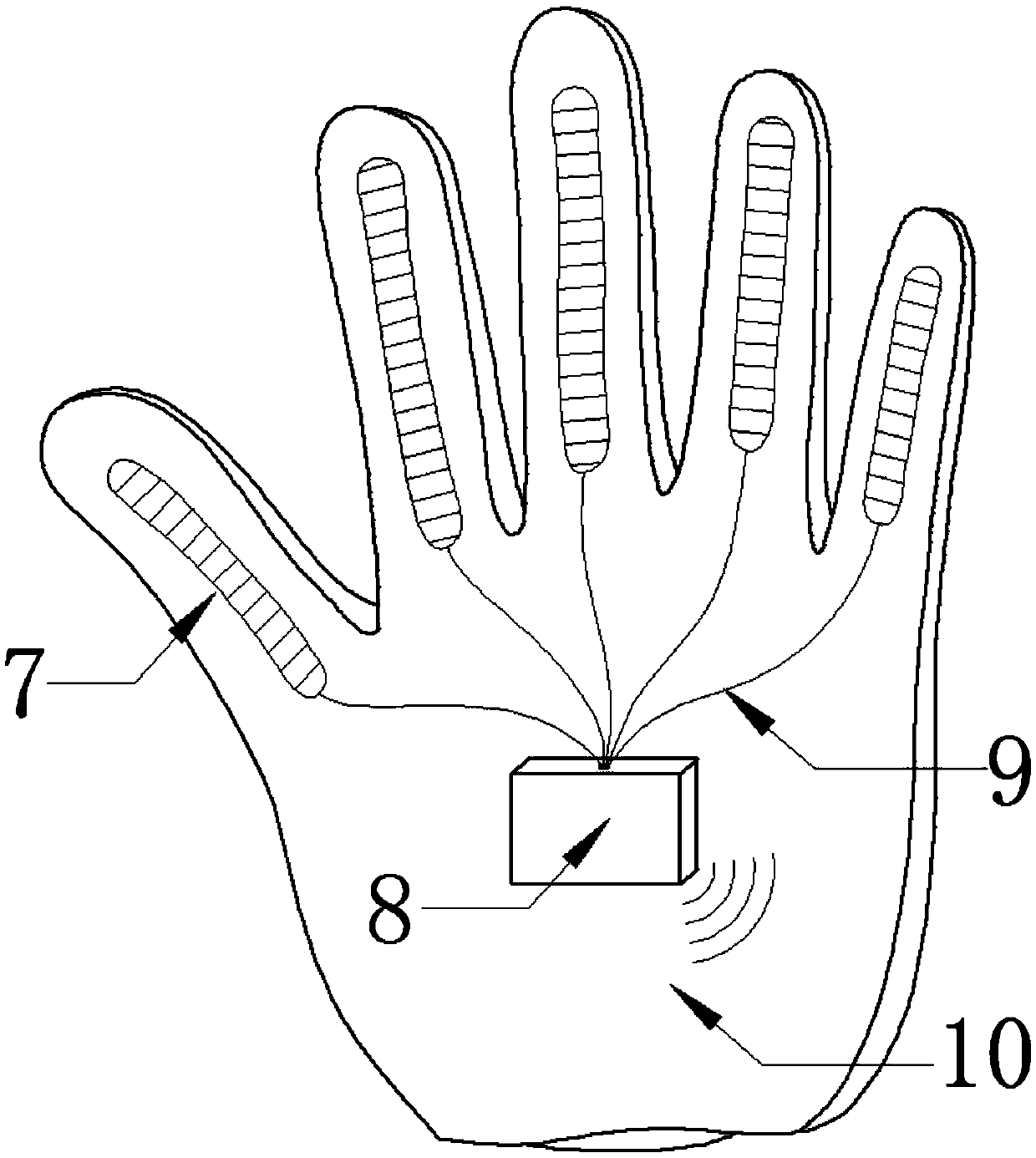
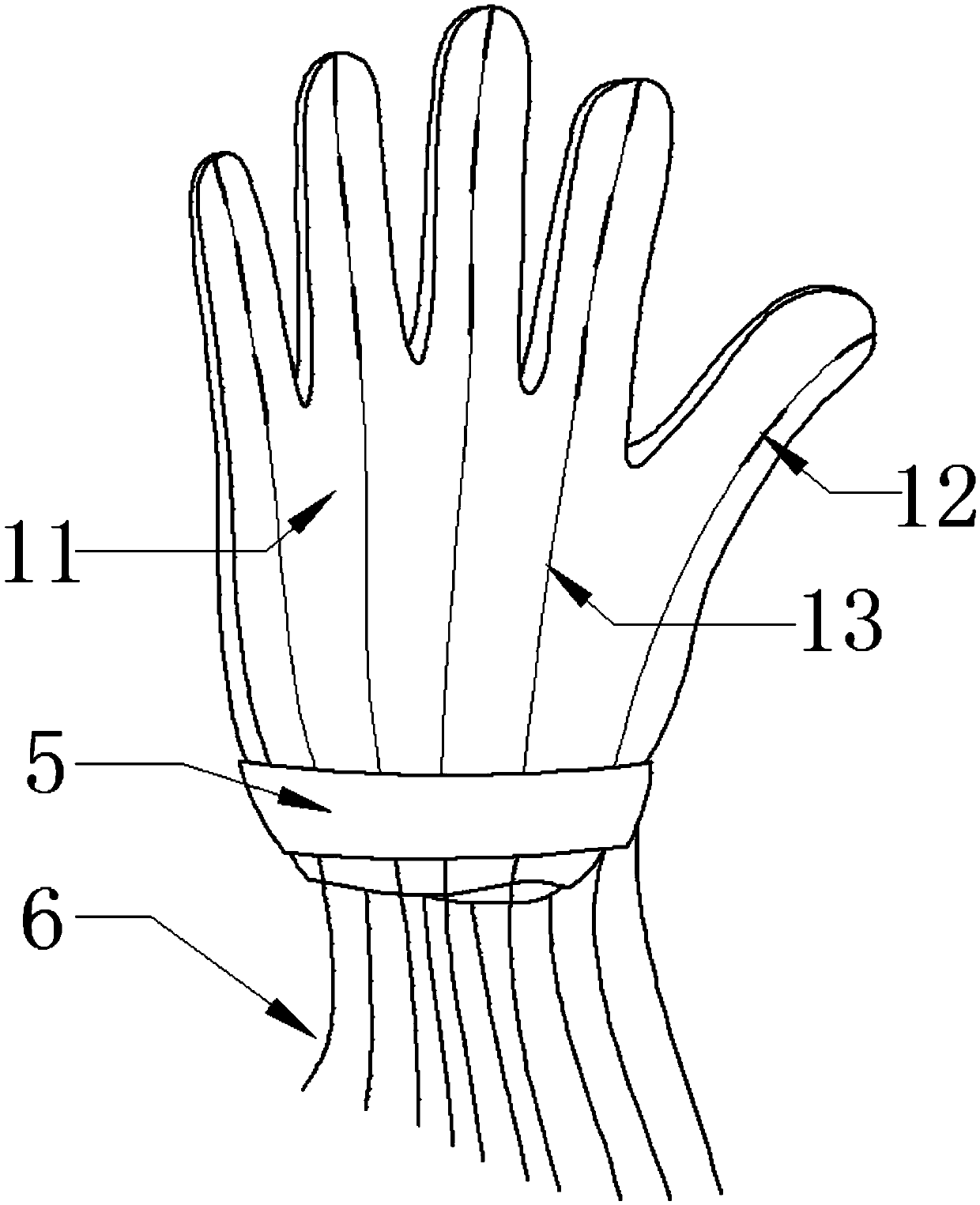
[0044] In this embodiment, the soft robotic glove for rehabilitation of hand motor function provided by the present invention includes a processing decision module 3, a driving module 4, a flexible exoskeleton glove 2 and a Bowden wire 6;
[0045] Wherein, the processing decision module 3 is electrically connected to the drive module 4; one end of the Bowden wire 6 is connected to the finger end of the flexible exoskeleton glove 2, and the other end is connected to the winch 22 of the drive module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More