

Super-close optimized collision-avoidance proximity method for failure satellite
An ultra-short-distance, satellite technology, applied in non-electric variable control, instrument, attitude control and other directions, can solve the complex configuration of the failed satellite, the difficulty and challenge of the fully autonomous approach process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
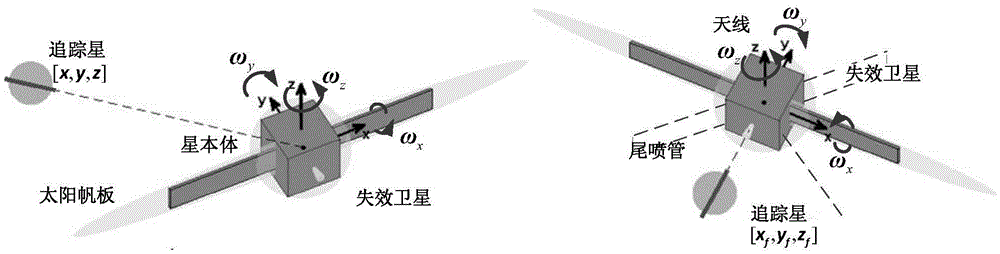
[0174] A super-short-distance optimal anti-collision approach method for a failed satellite of the present invention takes a certain failed satellite with a pair of solar panels, a single antenna and other accessories whose attitude rolls over as the research object. The initial angular velocity of the target is ω t =[0,0,0.05] T rad / s, configuration parameters are as follows:
[0175] Table 1 Target configuration parameters
[0176]
[0177] Such as figure 1 As shown, the tracking star first arrives at the mooring point X 0 =[-20,10,5] T m, and aim the relative measurement sensor on the tracking star at the target, that is, the invalid satellite. From here the tracker starts the approach control process. During this process, the tracking star maneuvers along the planned safe anti-collision path, and finally arrives at the parking position X at a certain distance from the target docking and capture site within a limited time of 50s.f =[0,-4,0] T m; At the same time, ...
Embodiment 2
[0283] An ultra-short-distance optimal anti-collision approach method for out-of-service satellites of the present invention takes a out-of-service satellite that is severely damaged in shape, does not have solar panels, and only carries accessories such as antennas and rolls over as the research object. The initial angular velocity of the target is ω t =[0,0,0.05] T rad / s, configuration parameters are as follows:
[0284] Table 1 Target configuration parameters
[0285]
[0286] The tracking star reaches the mooring point X first 0 =[-20,10,5] T m, and aim the relative measurement sensor on the tracking star at the target, that is, the invalid satellite. From here the tracker starts the approach control process. During this process, the tracking star maneuvers along the planned safe anti-collision path, and finally arrives at the parking position X at a certain distance from the target docking and capture site within a limited time of 50s. f =[0,-4,0] T m; At the sa...
Embodiment 3
[0321] An ultra-short-range optimal anti-collision approach method for failed satellites according to the present invention rolls with a certain shape damaged, only one side (+x direction) with a solar panel, and a single antenna and other accessories The failed satellites are the research objects. The initial angular velocity of the target is ω t =[0,0,0.05] T rad / s, configuration parameters are as follows:
[0322] Table 1 Target configuration parameters
[0323]
[0324]
[0325] The tracking star reaches the mooring point X first 0 =[-20,10,5] T m, and aim the relative measurement sensor on the tracking star at the target, that is, the invalid satellite. From here the tracker starts the approach control process. During this process, the tracking star maneuvers along the planned safe anti-collision path, and finally arrives at the parking position X at a certain distance from the target docking and capture site within a limited time of 50s. f =[0,-4,0] T m; At...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More