Multi-shaft unmanned aerial vehicle barrier avoiding system based on laser array, and barrier avoiding method thereof
A laser array and unmanned aerial vehicle technology, applied in the field of aviation science, to achieve the effect of simple structure and economical cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, descriptions of well-known structures and techniques are omitted in the following description to avoid obscuring the concept of the present invention.
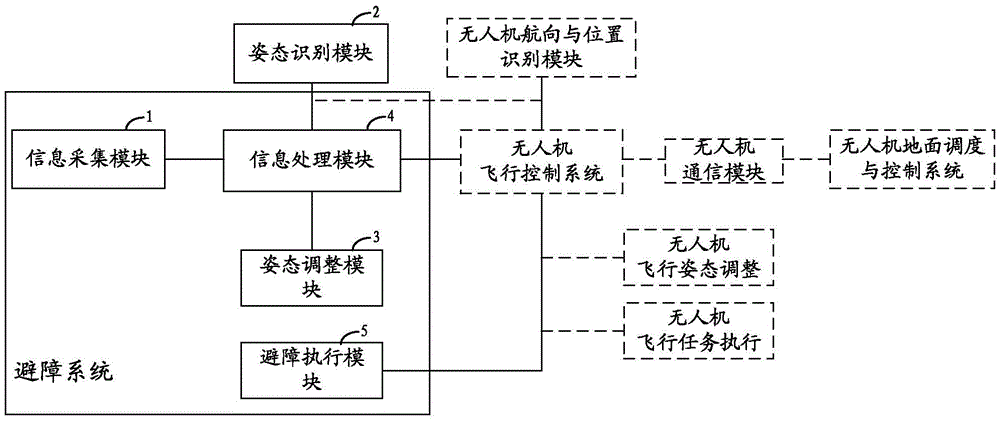
[0035] In order to meet the requirements of light weight of UAV airborne equipment, the present invention proposes a multi-rotor UAV obstacle avoidance method and system based on a laser array, which can be used in a three-dimensional environment along the The flight direction effectively realizes real-time detection and avoidance of obstacles for multi-axis UAVs, and at the same time meets the needs of lightweight UAV airborne equipment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com