

Parallel flexible component parallel clamping type adaptive robot finger device
A technology of robotic fingers and flexible parts, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of high manufacturing cost, small grasping range, and large mechanism volume, and achieve low manufacturing and maintenance costs and large grasping range , the effect of compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
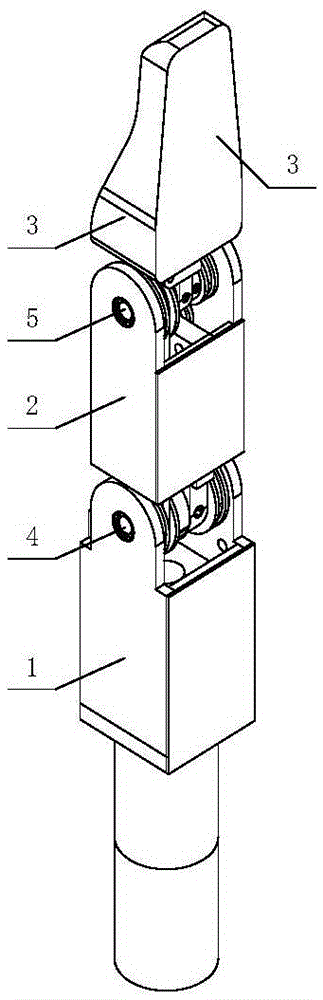
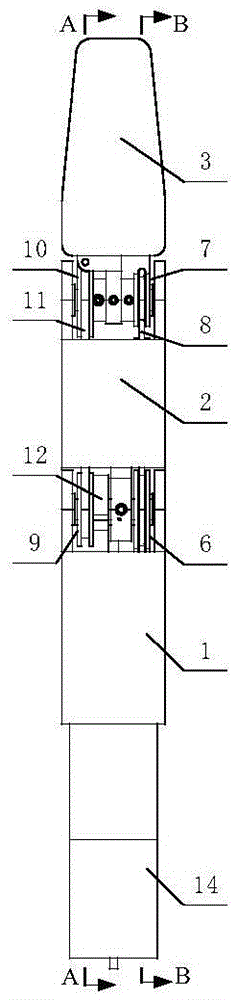
[0041] A kind of embodiment of the flat clip self-adaptive robot finger device of the parallel flexible part that the present invention designs, as Figure 1 to Figure 10 As shown, it includes a base 1, a first finger segment 2, a second finger segment 3, a proximal joint shaft 4, a distal joint shaft 5 and a driver 14; the driver 14 is fixedly connected to the base 1; the proximal joint shaft 4 The centerline of is parallel to the centerline of distal joint axis 5. This embodiment also includes a transmission mechanism, a first transmission wheel 6, a second transmission wheel 7, a first flexible member 8, a third transmission wheel 9, a fourth transmission wheel 10, a second flexible member 11, a bump dial 12, The first finger segment protrusion 25, the first spring member 13, the second sprin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More